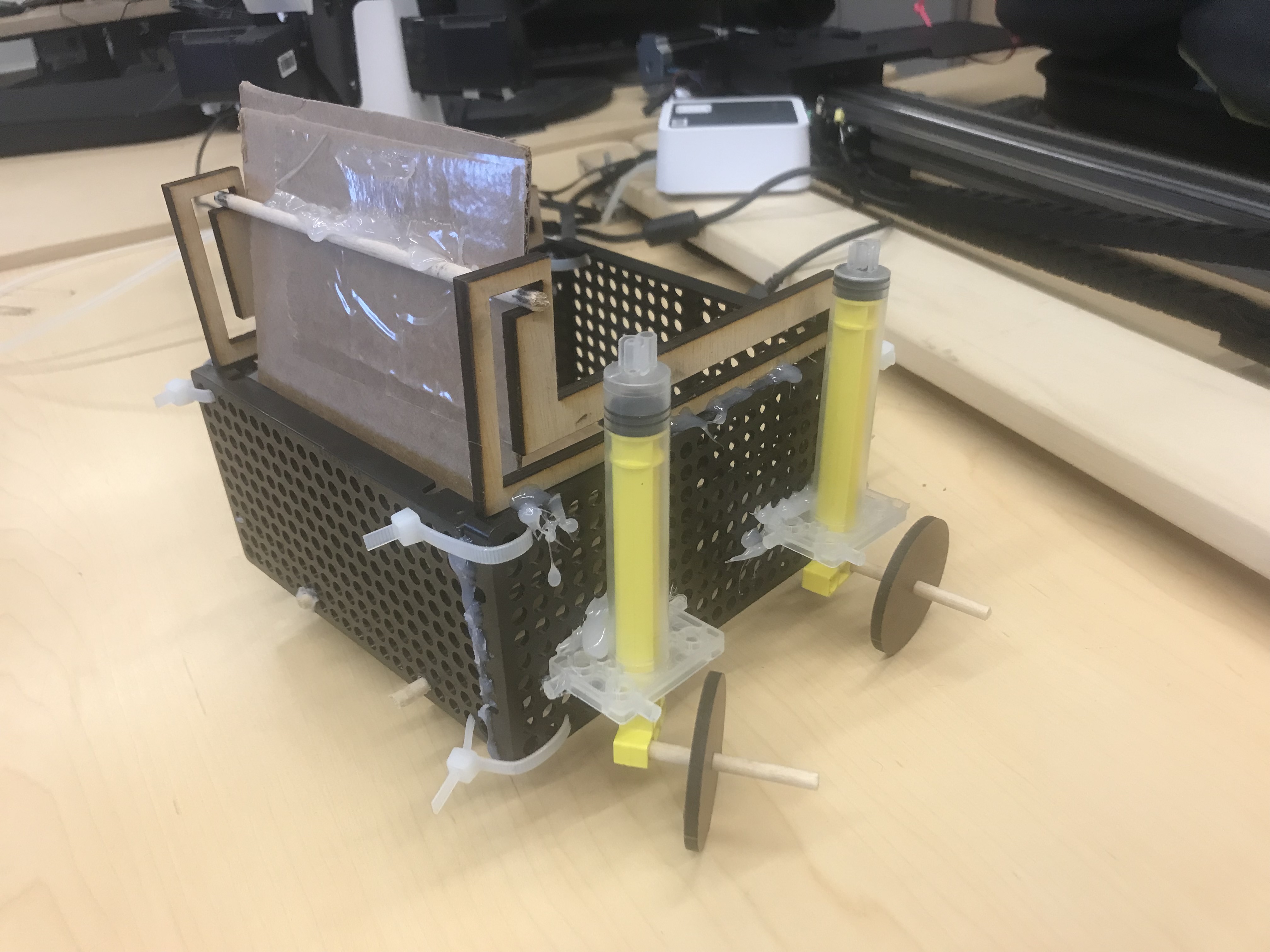
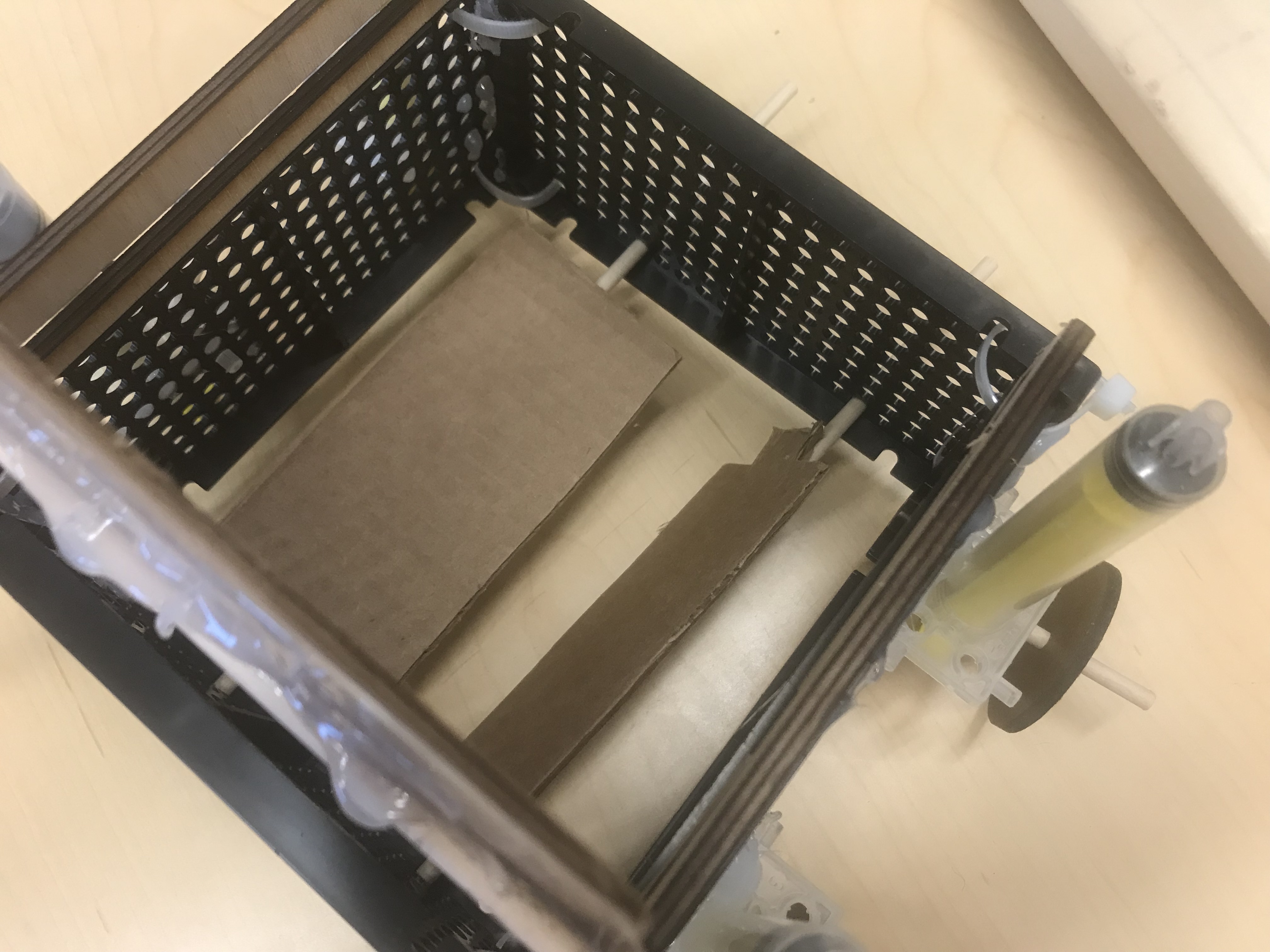
our design for a lunar robot uses the magnetic properties generated by the iron in the dust to collect it. This would require electromagnets in some form, we prototyped a version that used magnetic plates but similar designs may include magnetic brushes or scaled panels to create the most amount of surface area possible. the panels then flip and are cleaned by a brush with material that won't stick to the moon dust into a storage bucket. We would use scoop wheels that help with traction in low gravity and a pneumatic suspension system to lower the magnets so that they collect as much as possible and we theorize that we could pick up half to full inch layers at a time that can be scooped into the storage. we would want to collect perhaps half a gallon at a time with the next prototype
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org