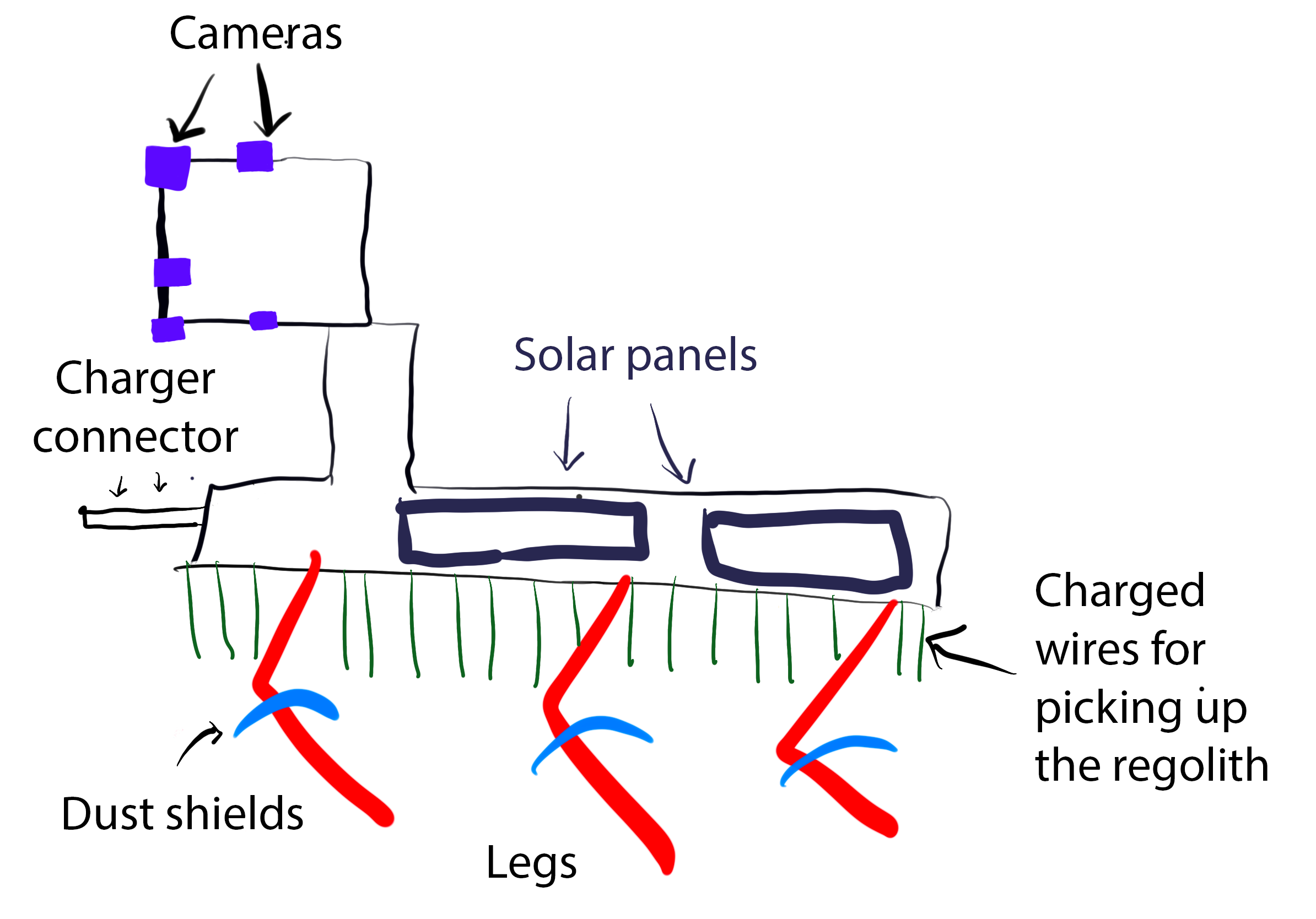
My Robot is inspired by a dog and a bee. I have included legs to walk over the bumpy train. The Robot can't pick up big rocks but it can pick up a lot of dust. It has wires on its underside to collect regolith dust like a bee collects pollen. The biggest problem of working on the Moon is the regolith sticking to everything. I used that to my advantage to collect the regolith using electrical charge because the regolith is electrically charged. The leg joints are protected from kickuped dust by dust shields.
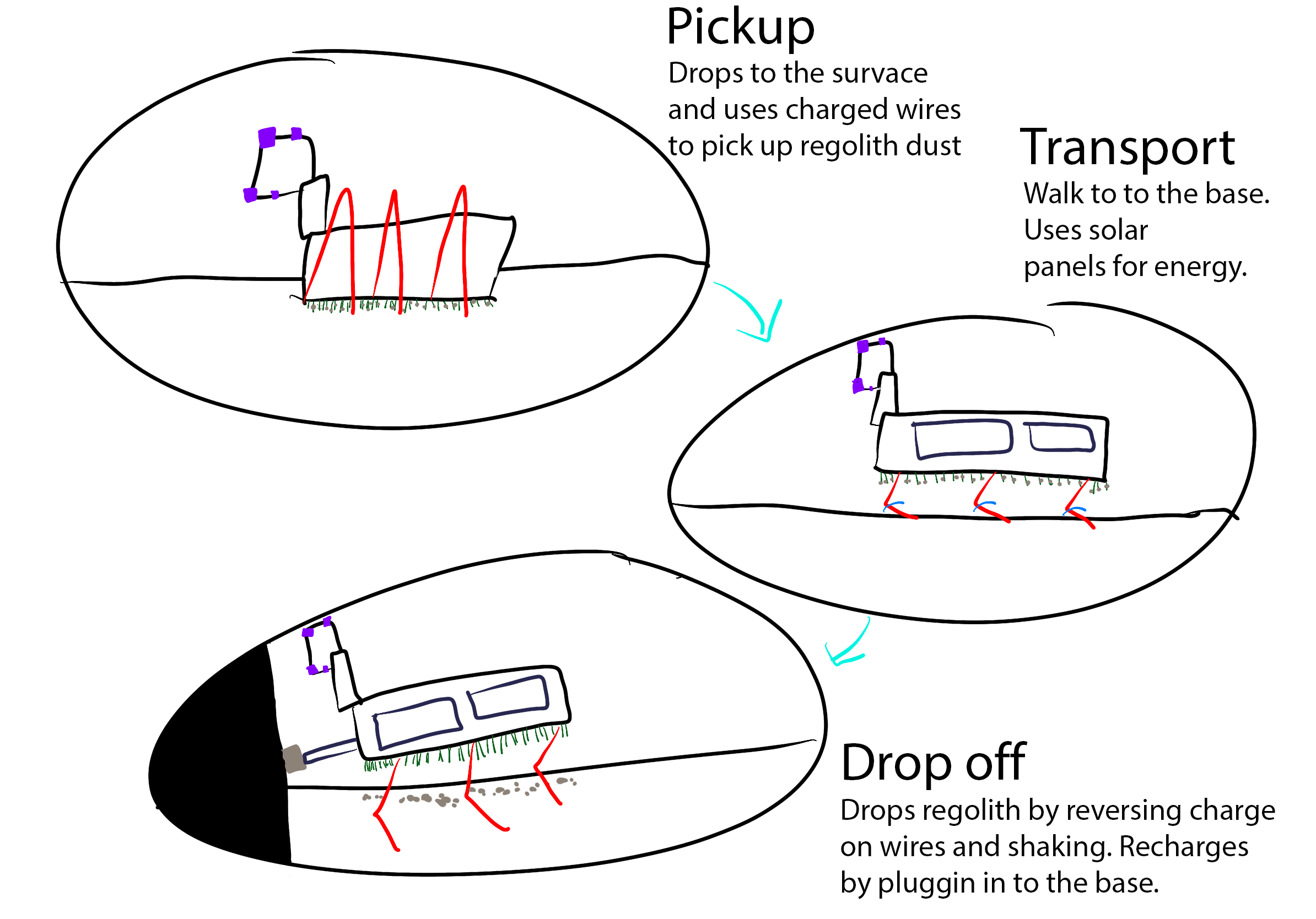
The regolith is collected when the robot goes down on its belly and the wires charge. Then it stands up and walks to the base using cameras and sensors to guide it. At the base, it shakes and changes charge on the wires to drop the regolith. It will also plug in to charge batteries.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org