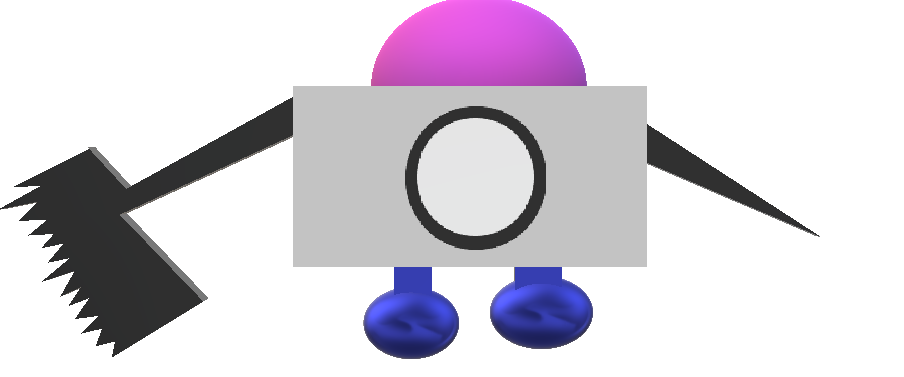
My robot's name is the Silver Soul. For my physical design, I created and built a “mega” drill, to be able to drill the lunar regolith, and I put a shovel connected to the front, to collect and hold the soil. For my operational design, I made it carry lots of dirt per trip to have fewer trips, rather than less dirt and more trips. I also made a specfic place in the robot where the shovel could turn and store some of the lunar soil, to make even fewer trips. My robot will handle lunar dust by having a “windshield wiper” with rubber that scraped off the dust without scraping the window.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org