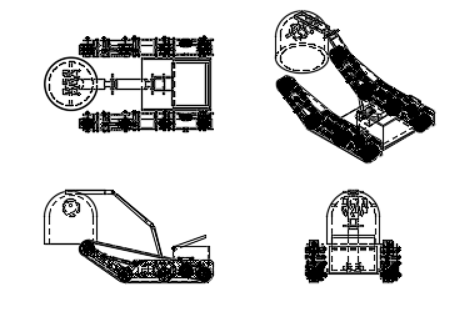

My robot will use an electromagnet to collect and transport lunar regolith. In case of low power, the robot arm can be used to move and scoop the regolith up. The amount of regolith being transported per trip is small due to the size constraints, but because it is made of aluminum it will still be able to move quickly. A box is located on the back of the robot to contain the tracker, batteries, and control system, and protect them from regolith. It moves using a tank track, so the wheels will not get less regolith on them. The robot is powered by solar power, though it does contain a battery for cases in which it is not light enough for the robot to obtain power from the sun; the solar panels are located on the arm so it will be harder for the regolith to hamper their efficiency.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org