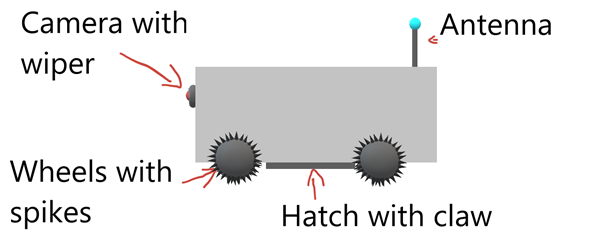
I designed a box bot. It is a medium-sized robot which will carry soil from the moon and allow researchers to learn more about the moon. The three most important parts about this robot are: its body, claw, and its wheels.
The robot’s body is in the shape of a rectangle with plating all over it making sure no dust gets into of the robot. It has a camera on the front with a wiper removing all dust on it. The claw will come out of a hatch in the bottom of the box bot get soil and retract the claw then the hatch will close the claw will open and all the lunar dust will be separated from the soil using a magnet inside a small compartment on the side, and the wheels have spikes to get a grip on the soil.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org