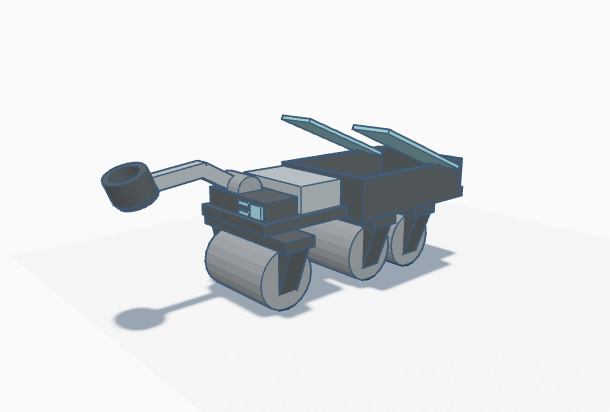
So what I thought the physical design should be is a little bucket scooping the dirt off and rotating the arm 180 degrees to dump that exact dirt into the back. While throwing the dirt inside the back, the rover might need to be careful due to the solar panels in the back.
My rover will be able to pick up a medium sized amount, probably enough dirt to study and use. The rover will also be able to empty by opening the back and using a hydraulic stand to turn the back about 45 degrees, a high enough angle where the dirt should be able to fall out.
The way I deal with dust is by putting every bit of mechanic inside a metal layer. For example, the wedges at the wheels are for the motors.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org