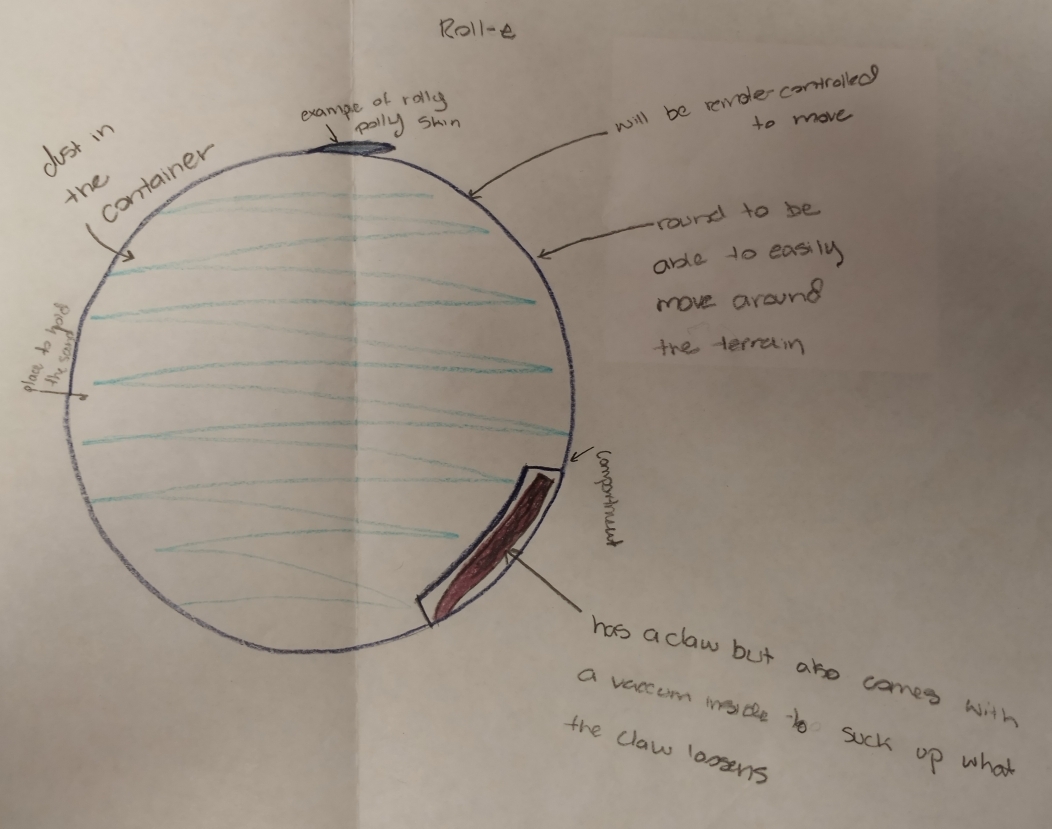
Lunar Bot will be in the form of a tire, which moves around easily. A small compartment inside will hold the vacuum digging arm. This will connect to the larger compartment of the wheel area, meant to hold lunar dust.
The digging arm will be retractable, so the robot can roll away without breaking. The arm can extend to get what samples are needed.
Another concern is lunar dust coating the robot and leaving the robot in bad condition. The robot will have a skin almost like a Roly Poly, allowing the dust to just slide off of the metal rather than stick into the surface. The metal of the Roly Poly is like an expandable skin, allowing it to move in tighter around the robot or become looser. This will allow the robot to adjust to conditions outside and the terrain for which it will be riding around in.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org