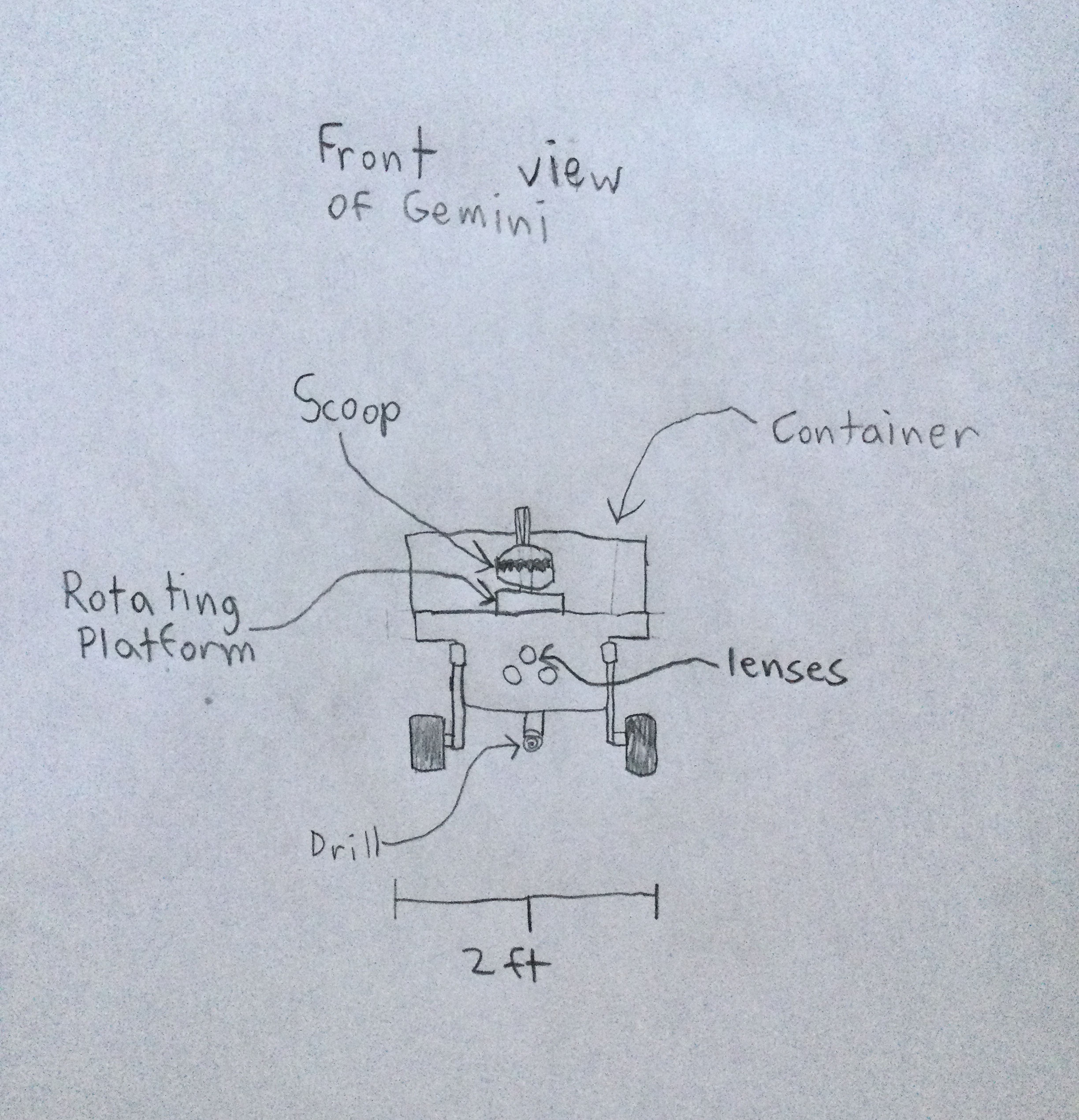
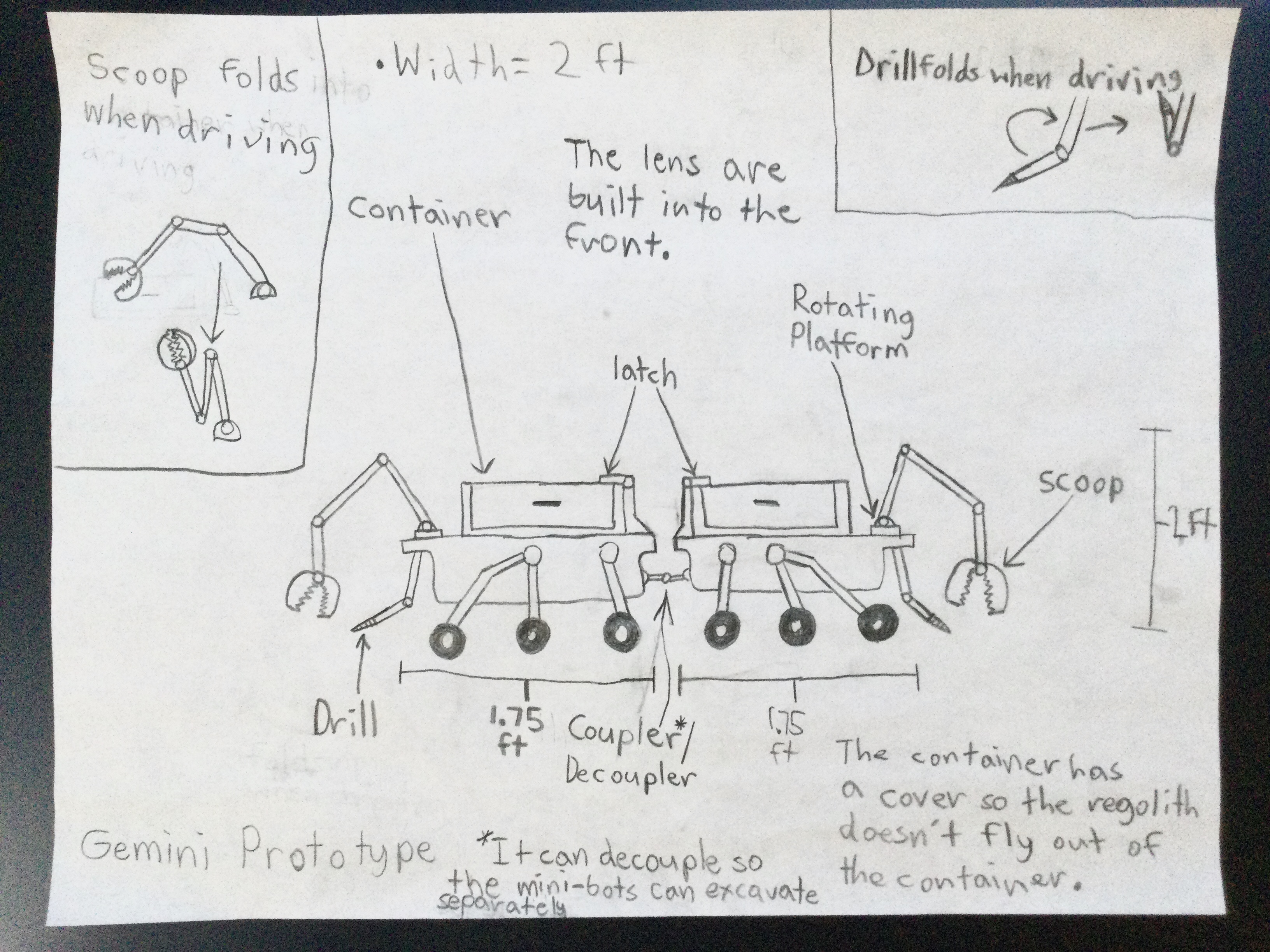
My robot is a coupling robot, made up of twin mini robots, hence the name Gemini. It will excavate and carry regolith. I incorporated a drill and scoop for excavation. The design for Gemini will allow it to work more efficiently and transport more regolith. I used wheels because they have greater available freedom in their independent suspension than tracks and don’t jam as easily. Magnesium alloy NX1 will be used for certain parts because it’s light as aluminum but strong as titanium alloy. This will make the rover stronger and sturdier, yet lighter for transport. NASA is already testing alloy NX1. The rover will be painted outside and inside with negatively charged paint so it repels moon dust. I know that negatively charged objects repel other negatively charged objects, and since lunar dust is negatively charged due to constant exposure to radiation, the paint should repel it.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org