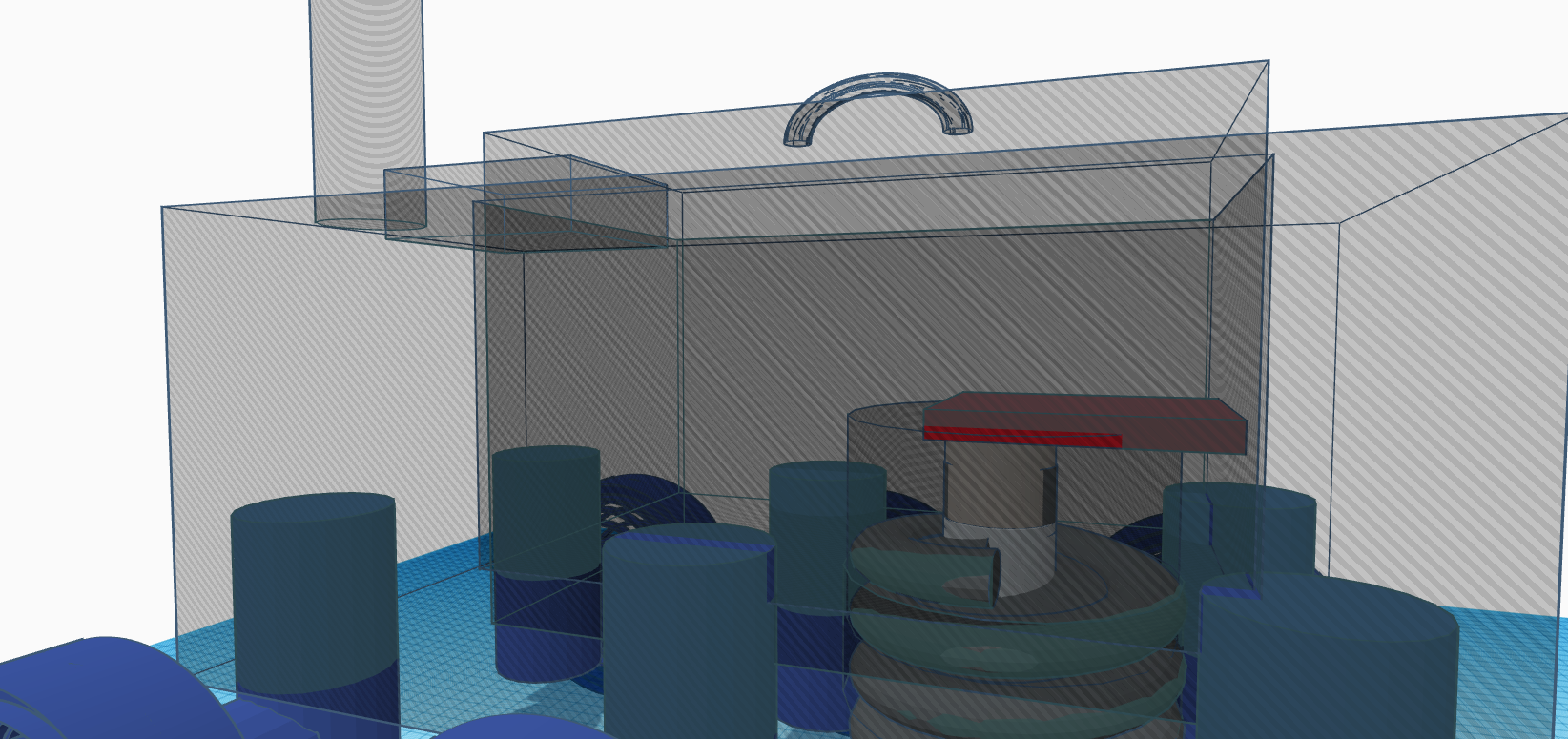
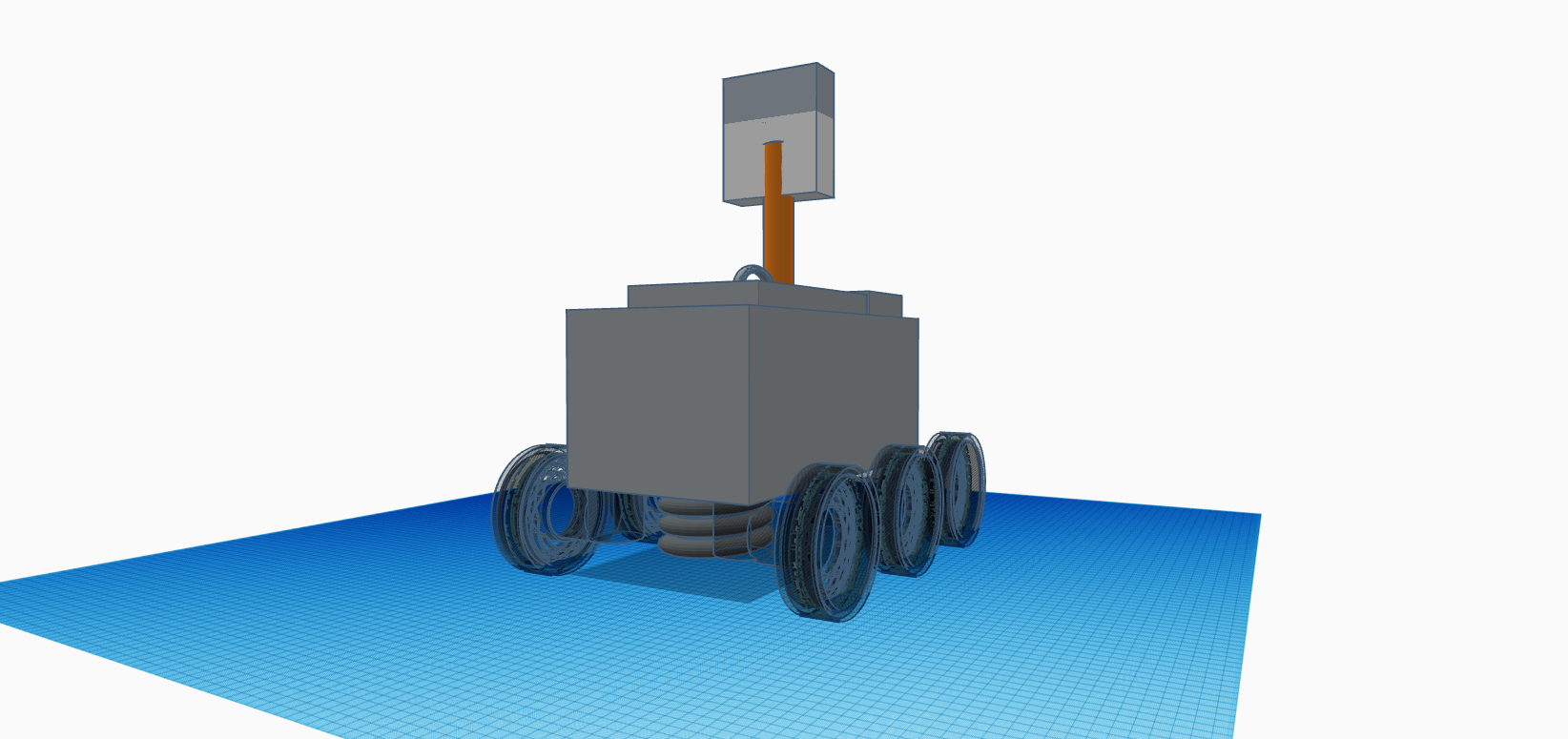
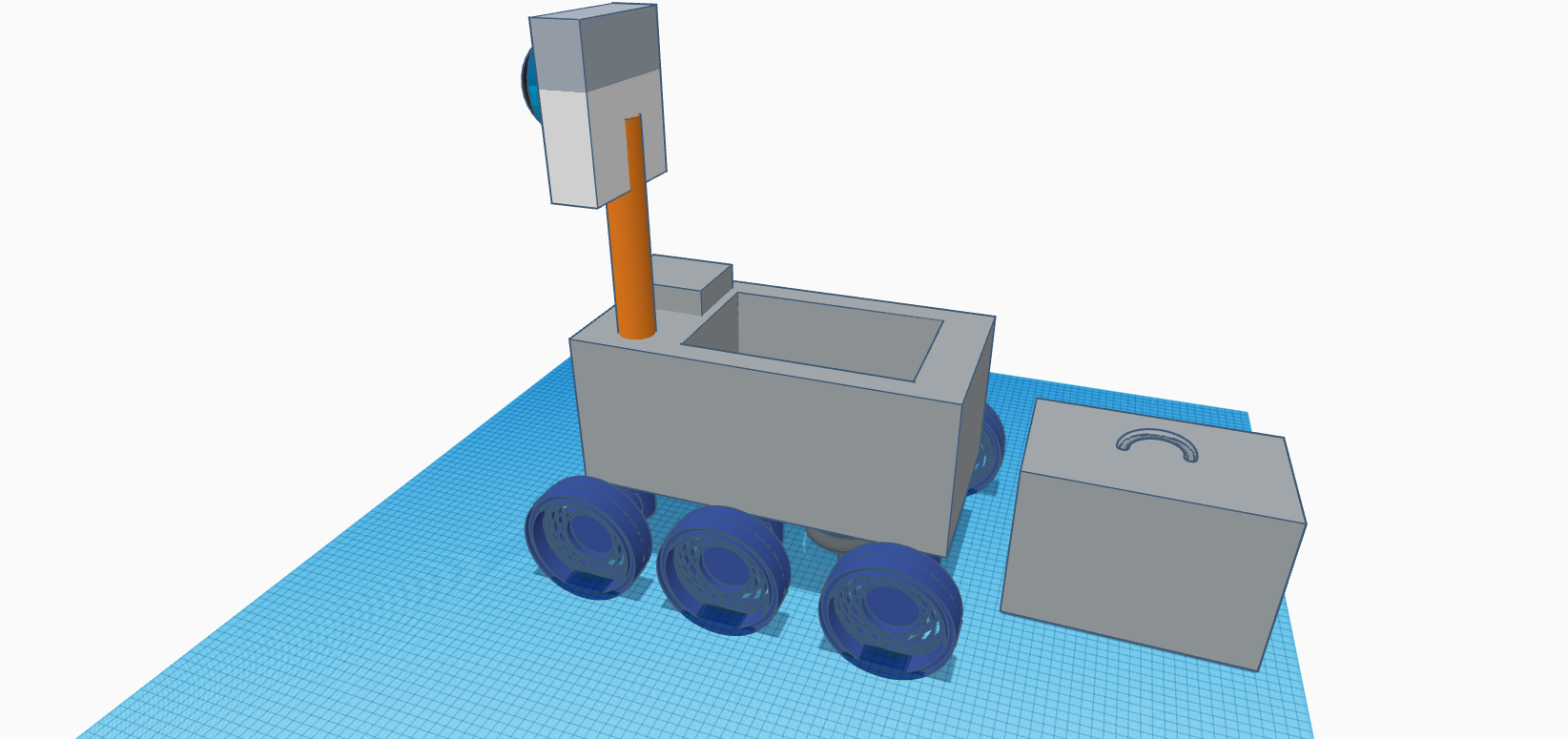

Auger2.0 is powered by plutonium stored at the front in a box. The weight of the fuel box helps to maintain the center of gravity, that can keep the rover stable and balanced in all scenarios of tipping. The rover moves at a speed of 5 mph and has airless tires that will not pop. A coating of Indium Tin Oxide will protect exposed parts from moon dust. A GPS will provide the location for the digging site and Auger2.0 creates the fastest path along with course corrections using Artificial Intelligence to further avoid unseen obstacles. Large part of the rover is reserved for regolith, lowering the number of trips. Upon reaching the site, the auger will help bring up the regolith into the storage box which will be lifted off using a crane once the rover reaches the base. The rover has space to carry equipment for other experiments.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org