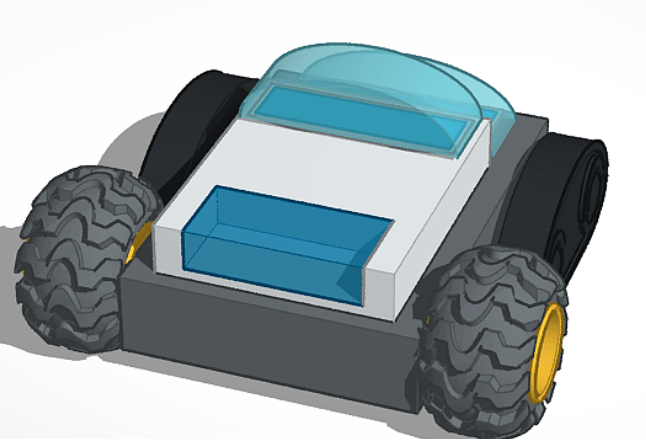

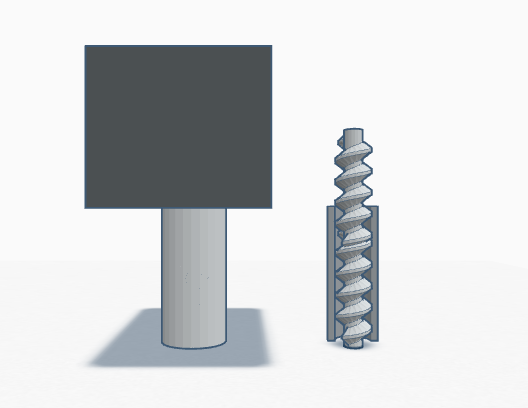


The lunar sampling robot incorporates a lead screw to pull lunar soil into a container on the inside. In order to lower the lead screw into the ground the rover’s frame is made in two pieces allowing for the collection and movement pieces to move independently. For movement the rover uses a set of treads for traction and uses a set of wheels for steering and better control. The rover is solar powered and uses sets of covers to prevent regolith from sticking to the panels, opening when the rover needs to recharge.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org