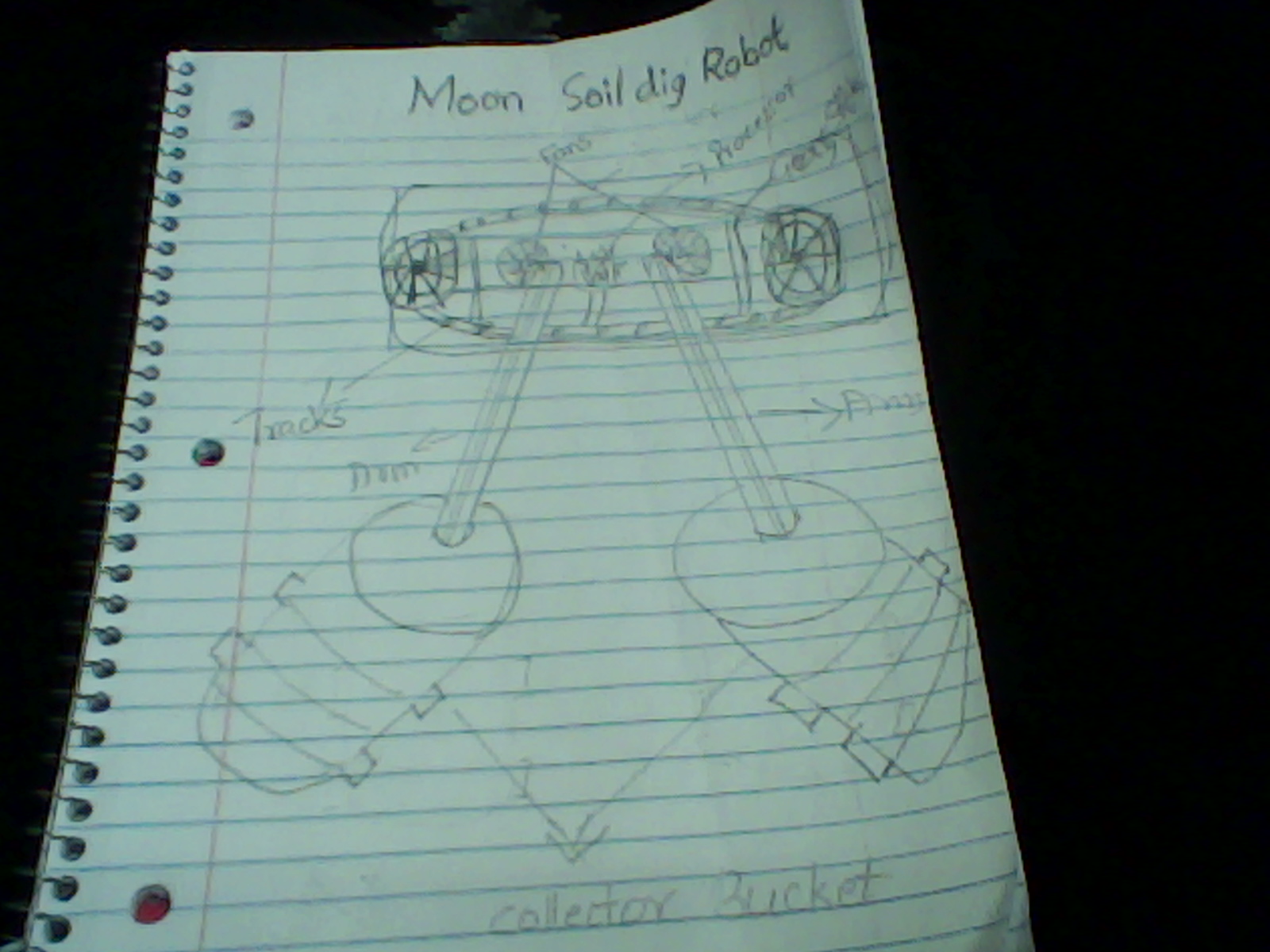
My robot has two flexible arms, each one can independently go up and down. It also has collector buckets to collect and store the lunar soil. It has a gear and stick to spin and move forward and backward. Plus it has tracks to move freely. My robot is combined with tracks and processing systems. The plan is it would go to the dig site and collect lunar soil. Then delivers the soil to the processer and would extract water and other things out of it. My robot is manipulated with fans to blow away the dust on it.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org