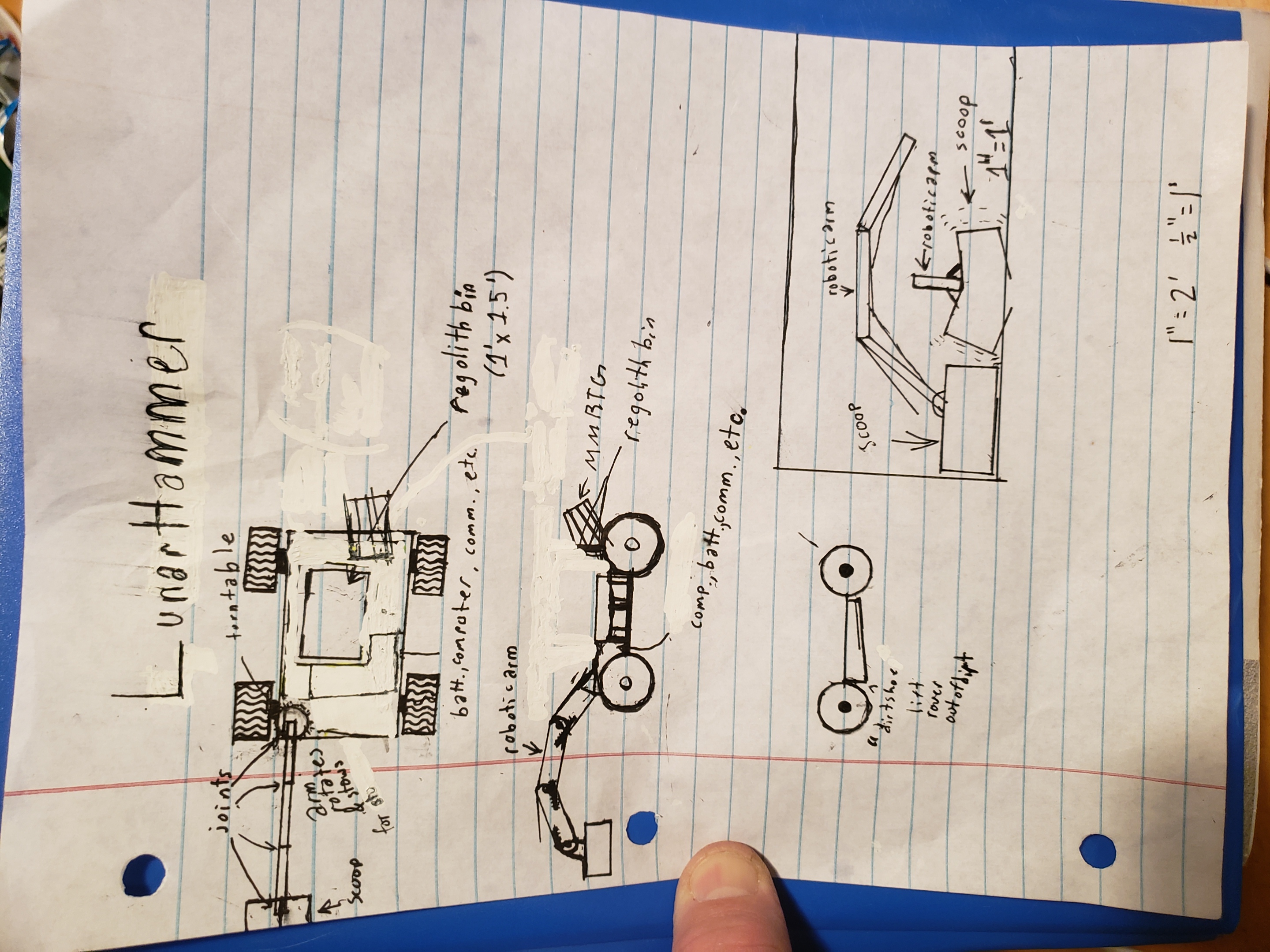
My Lunar Regolith Collection Robot has a turning, three segment robotic arm, with a digging scoop at the end, which opens into two halves, and digs by quickly jerking open and closed a few degrees while slowly closing. The scoop has a "wiper" system to wipe the lunar regolith from the inside of the scoop once the load has been dumped. The computers, comm., battery, etc.,are housed inside an enclosed box with heat radiators to radiate heat out of the box. It's powered by a Multi-Mission Radioisotope Thermoelectric Generator, or MMRTG, which converts heat into electricity.(MMRTG was used on the latest Mars rovers.)
It steers like a skid-steer, moving the left and right wheels at different speeds. In case the rover sinks into the dust, it has "dirt shoes" that go down from the underbelly so that the rover can back out of the soft spot.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org