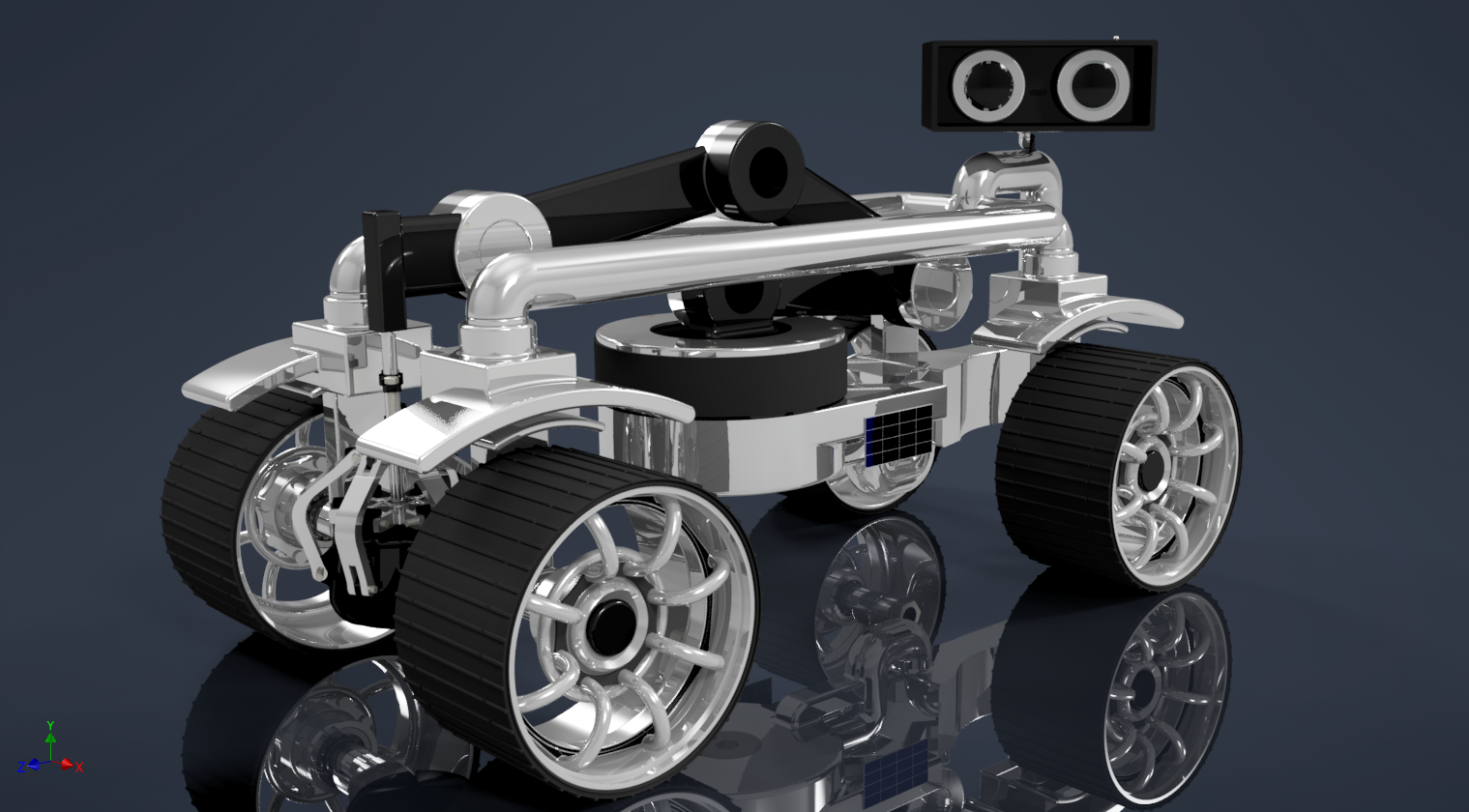
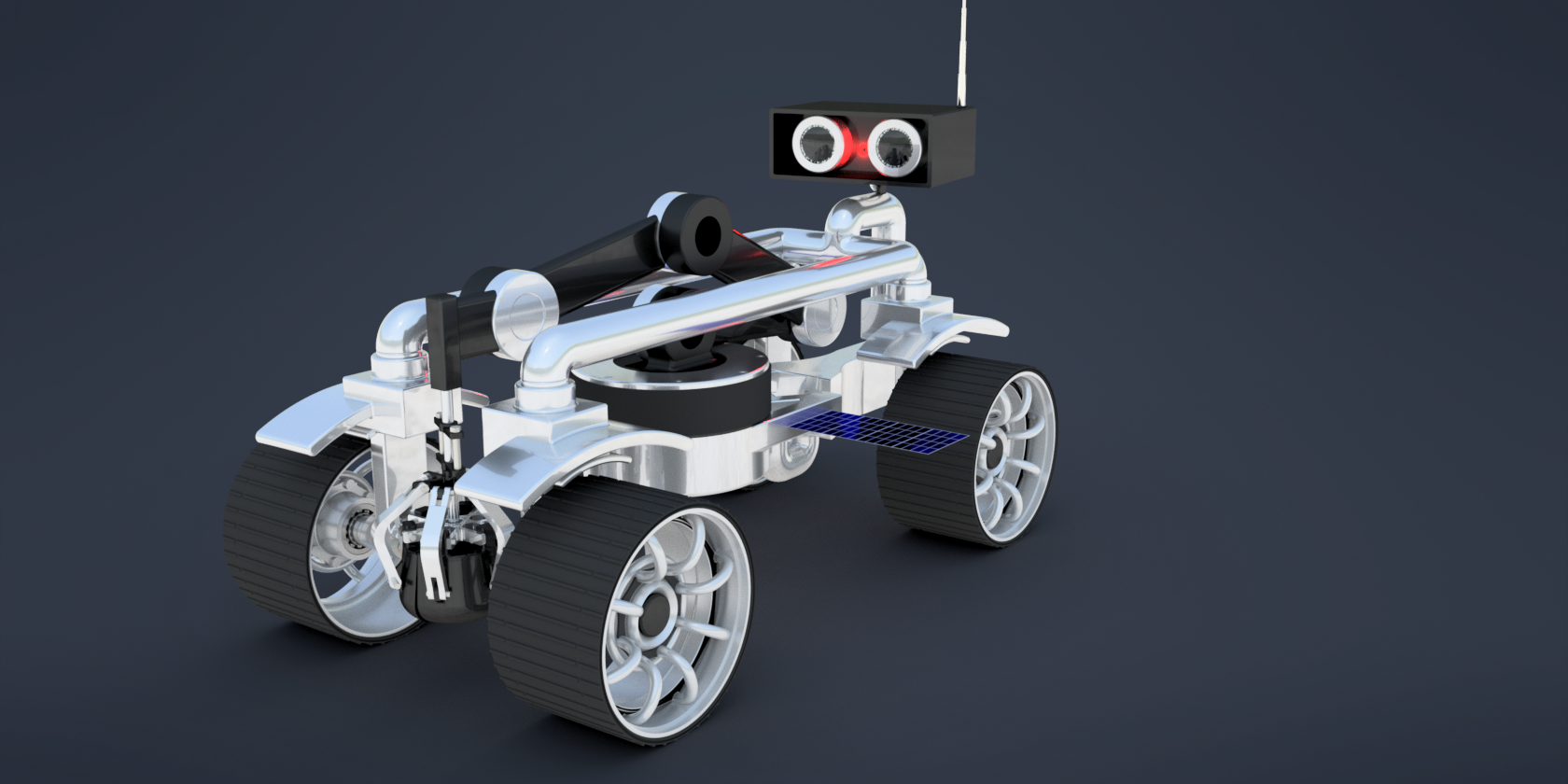
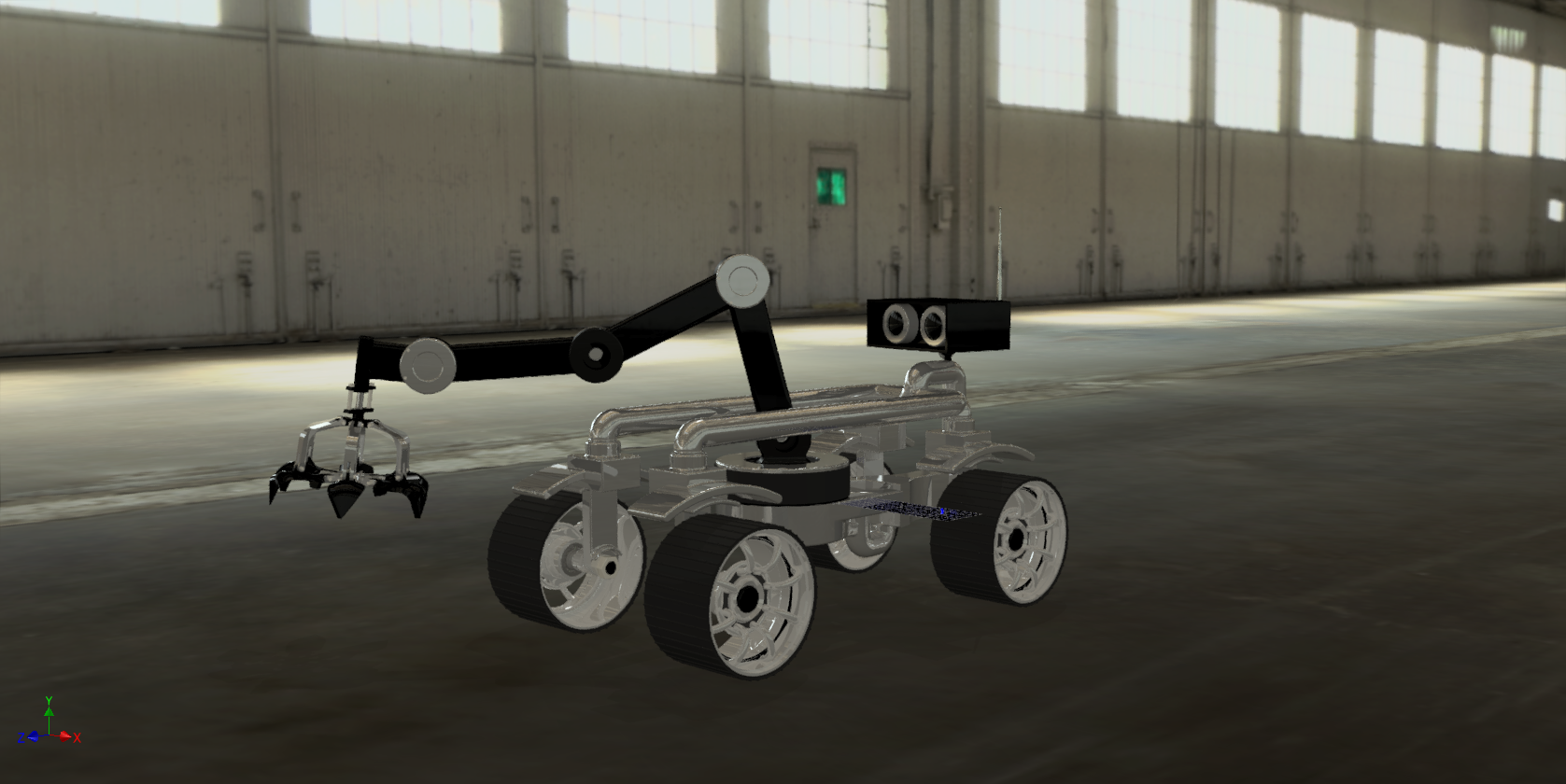
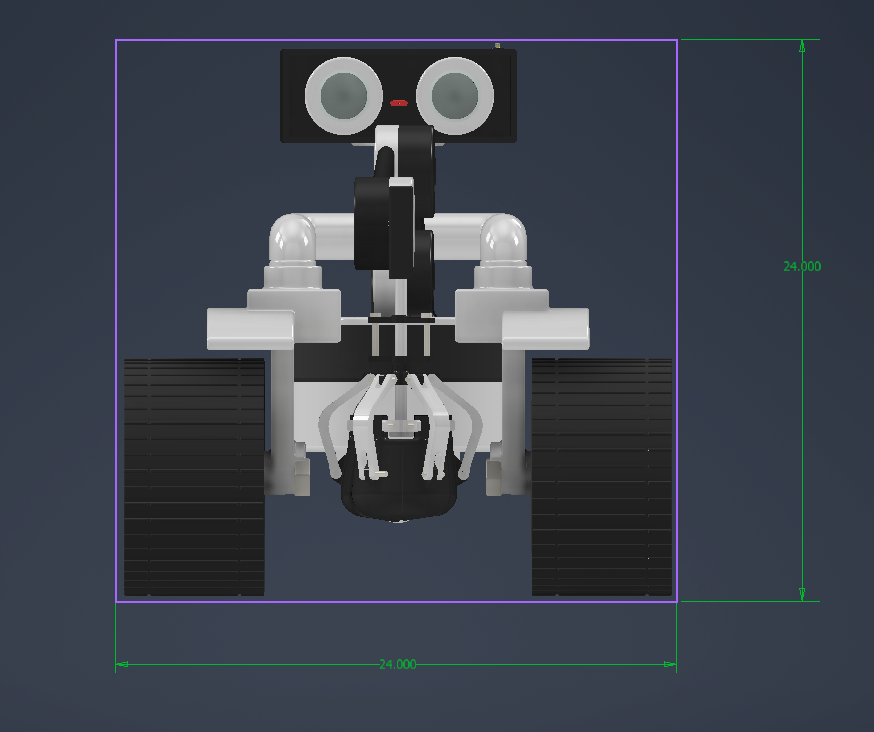
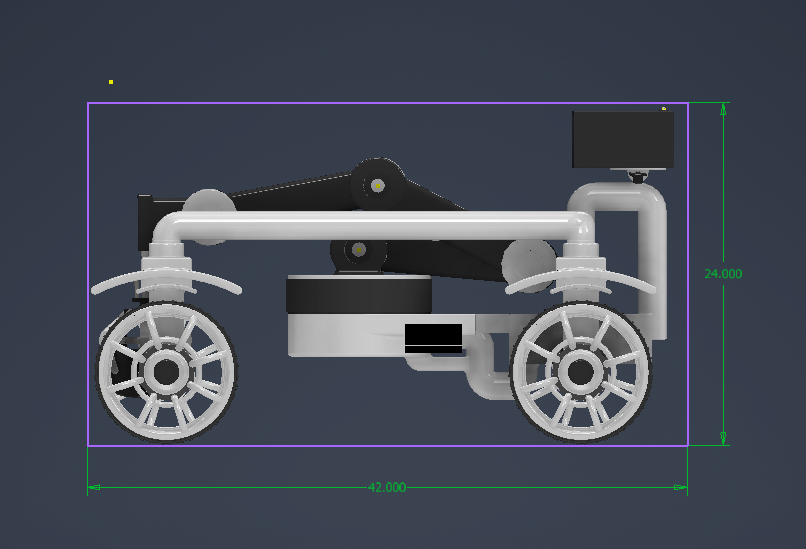
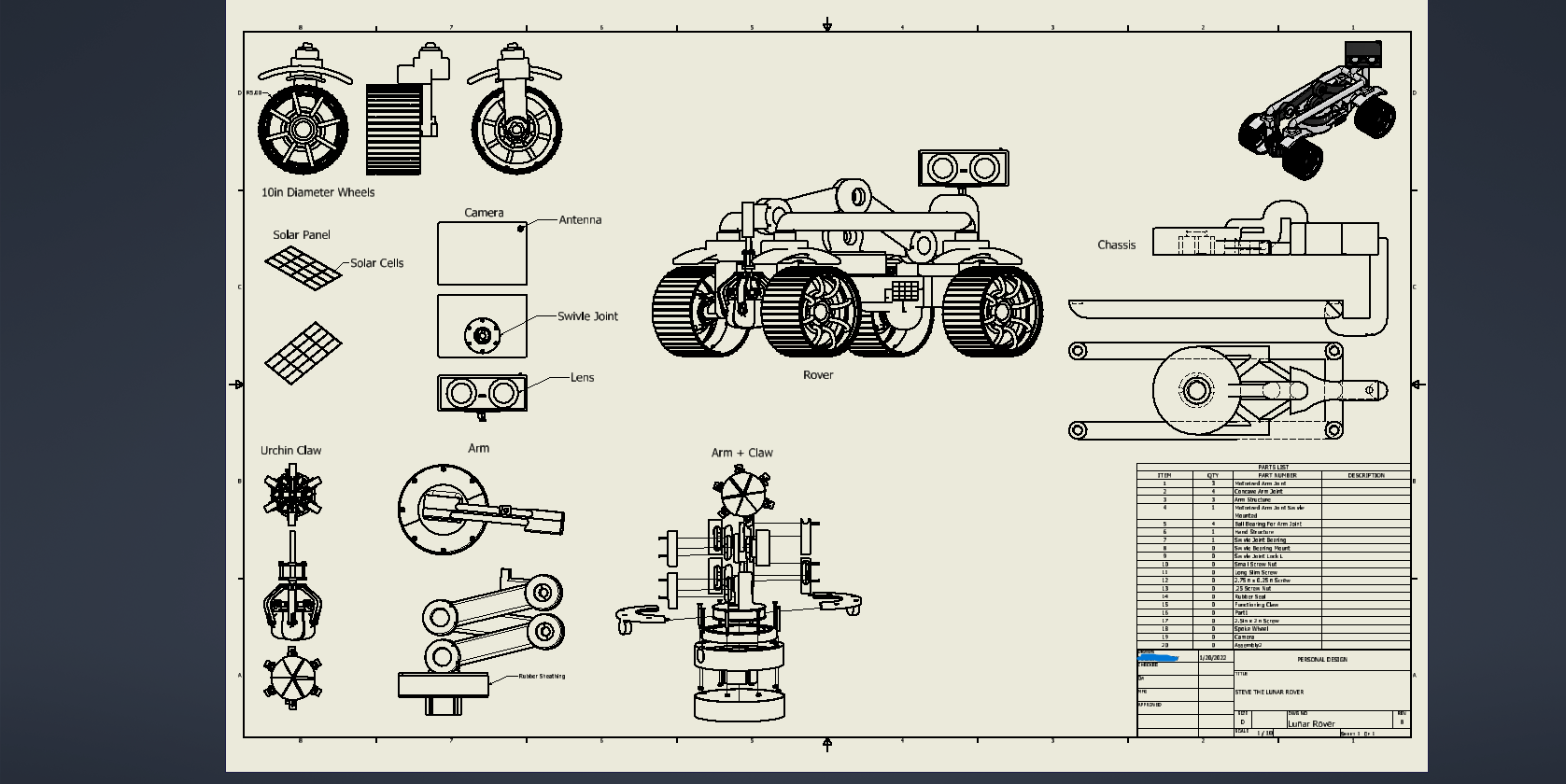
The Lunar Robot has a strong, lightweight design utilizing aluminum alloys, it has four spoke wheels. Each wheel moves independently and connects directly to the chassis. The chassis suspends the arm in the center of the rover to keep the rover balanced. The arm is on a swivel that provides a full 360 degree range of motion, and stretches to about three feet. The claw of the arm, which was inspired by the Robotic Urchin Claw, is suspended at the end of the arm for digging lunar soil. The camera acts as the eyes of the rover and sits at the top of the chassis. The camera has an antenna to capture signals and provide functionality and control of the rover. The solar panels on the sides of the rover extend to absorb the light energy and provide power. Joints use rubber sheathing to prevent lunar dust from damaging internals.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org