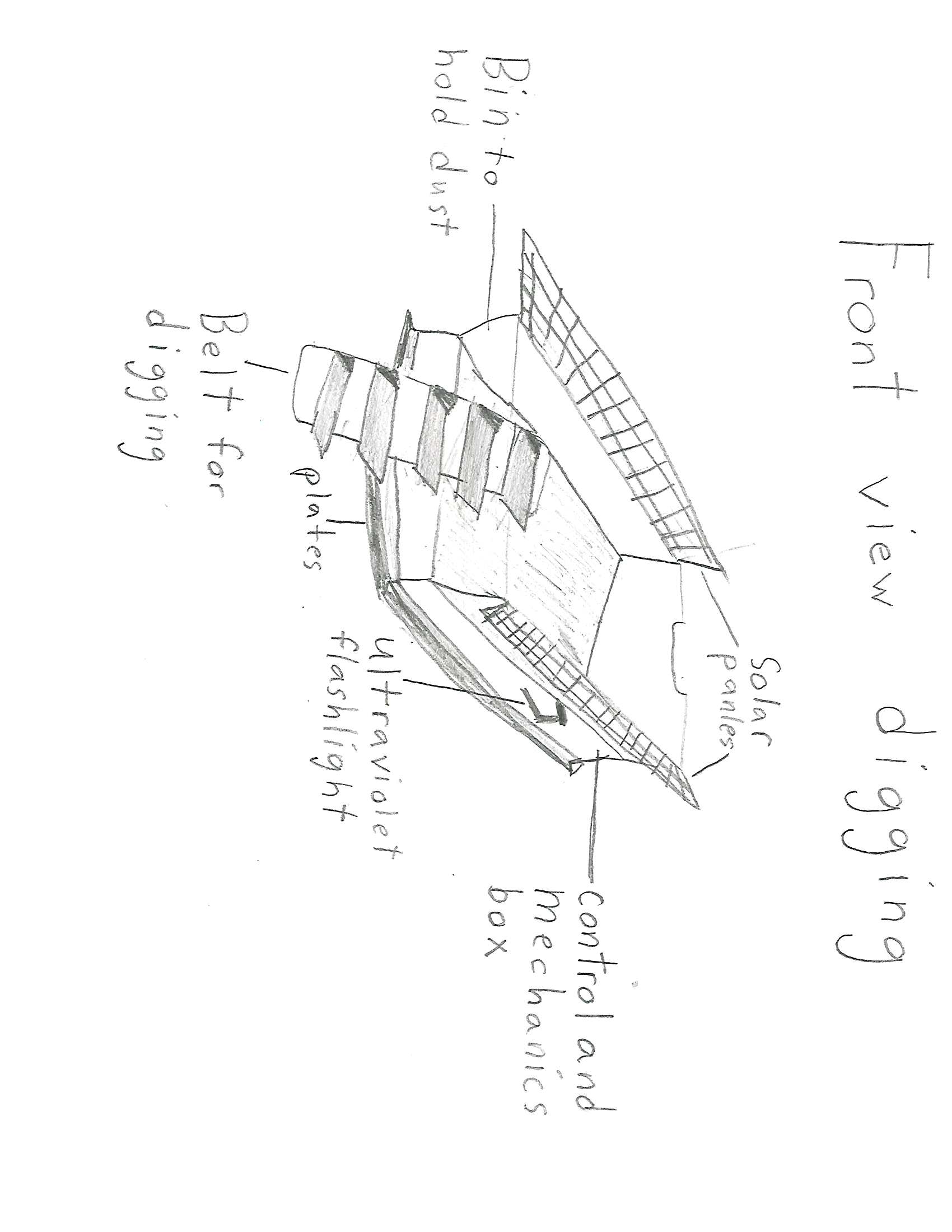
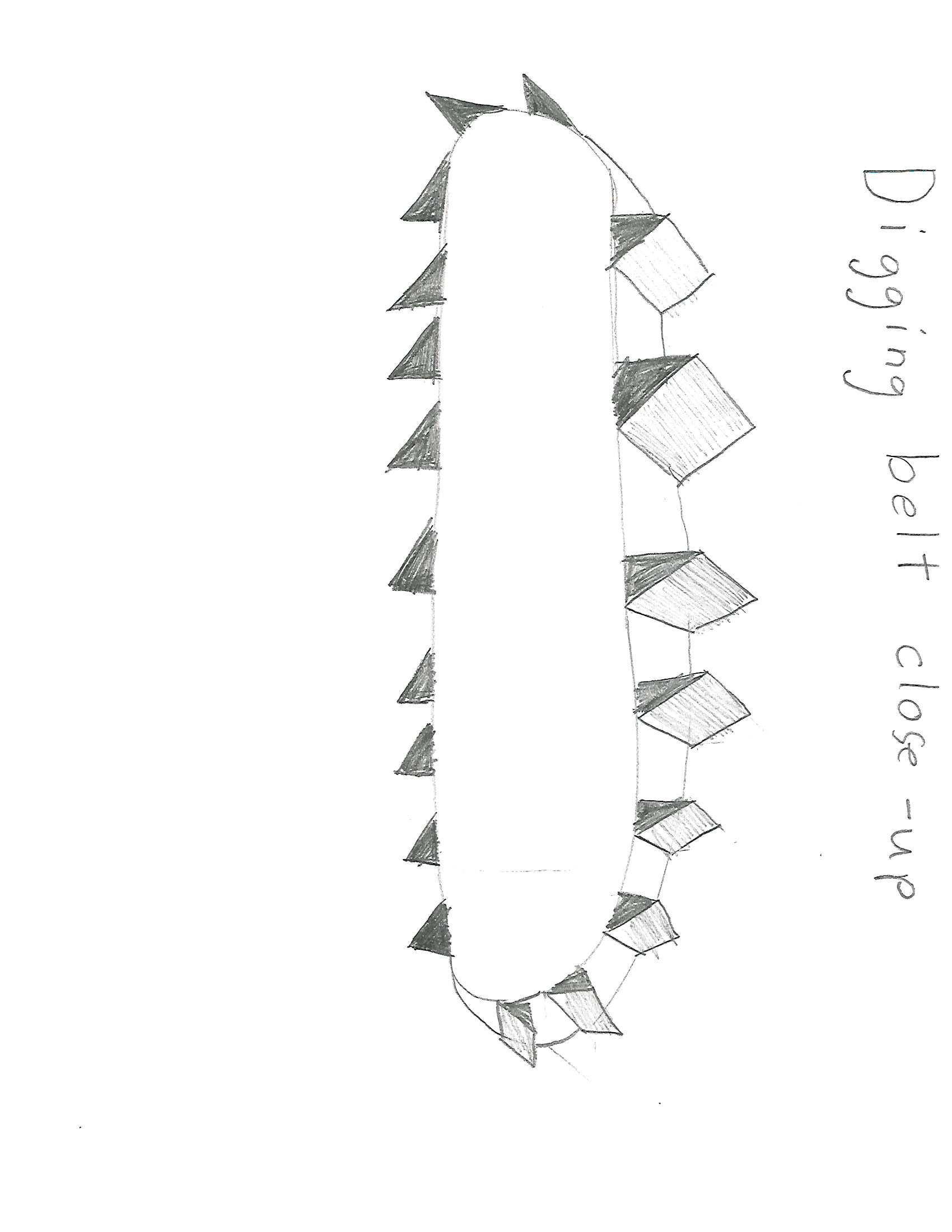
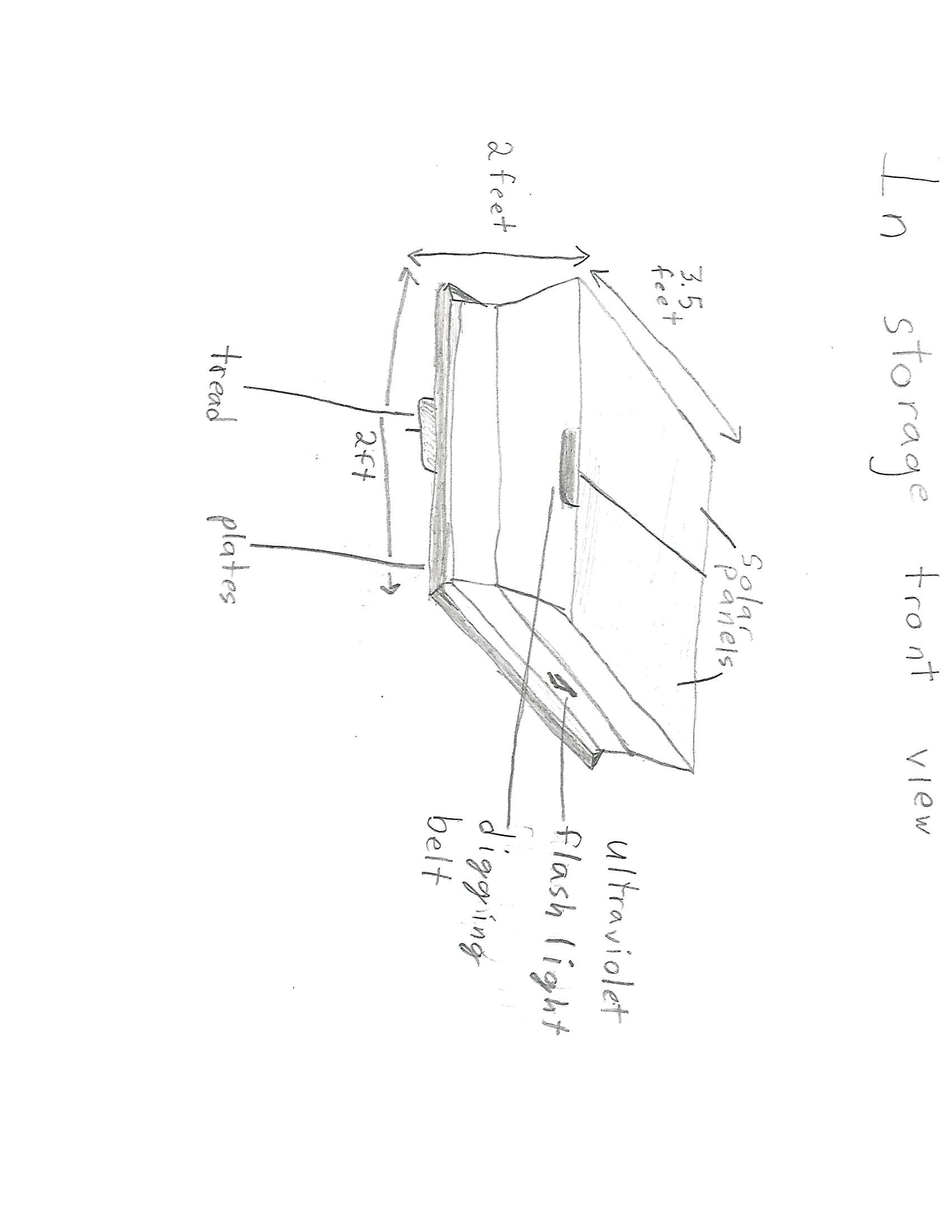
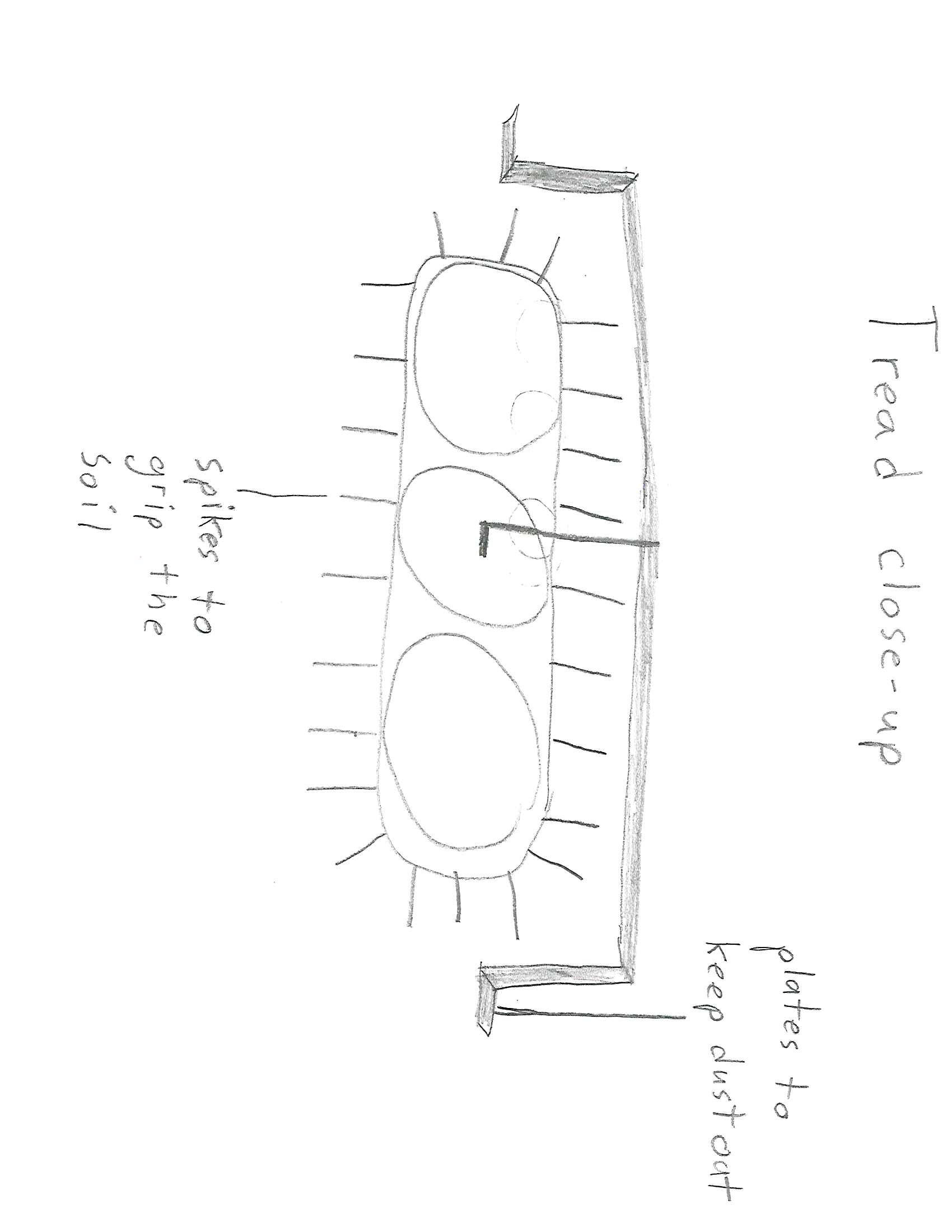
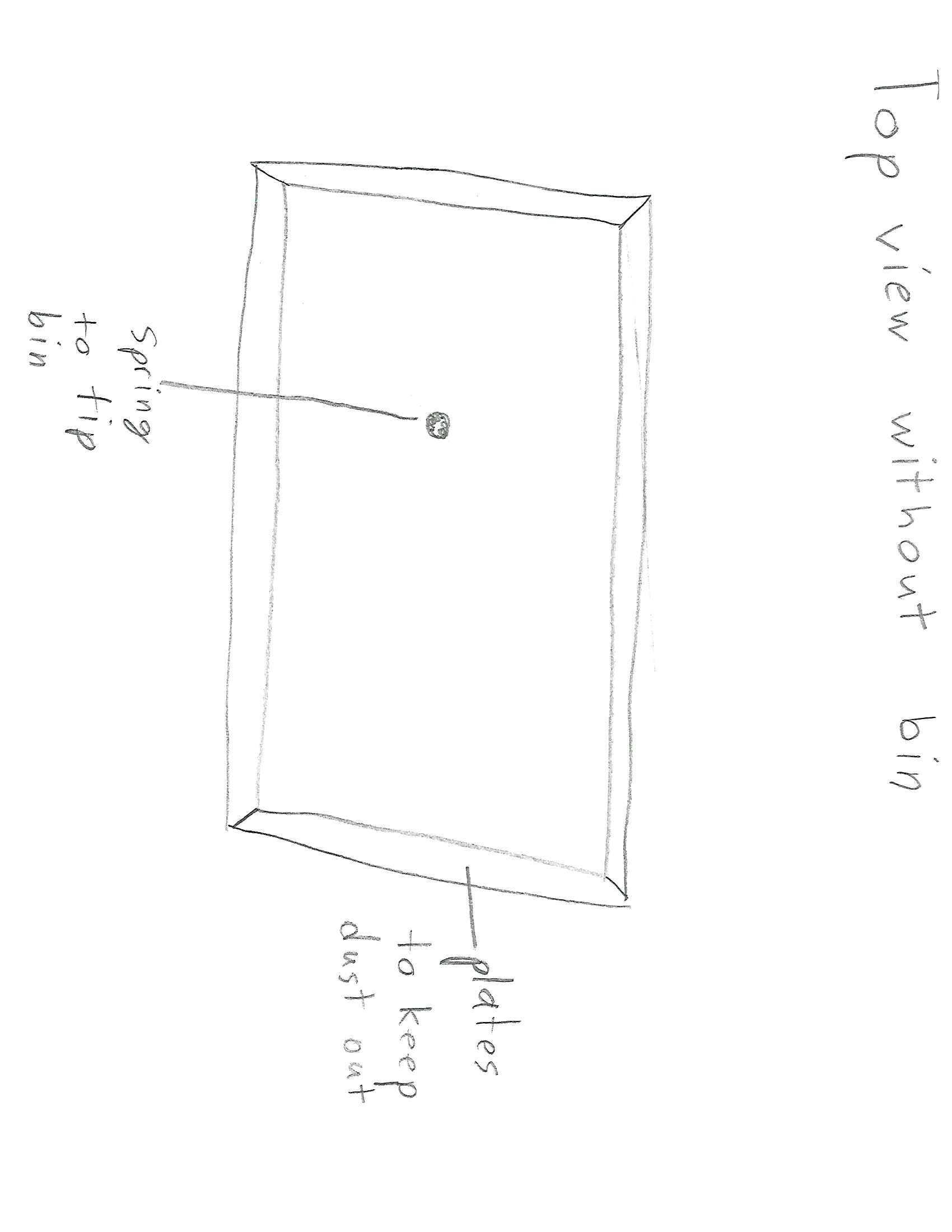
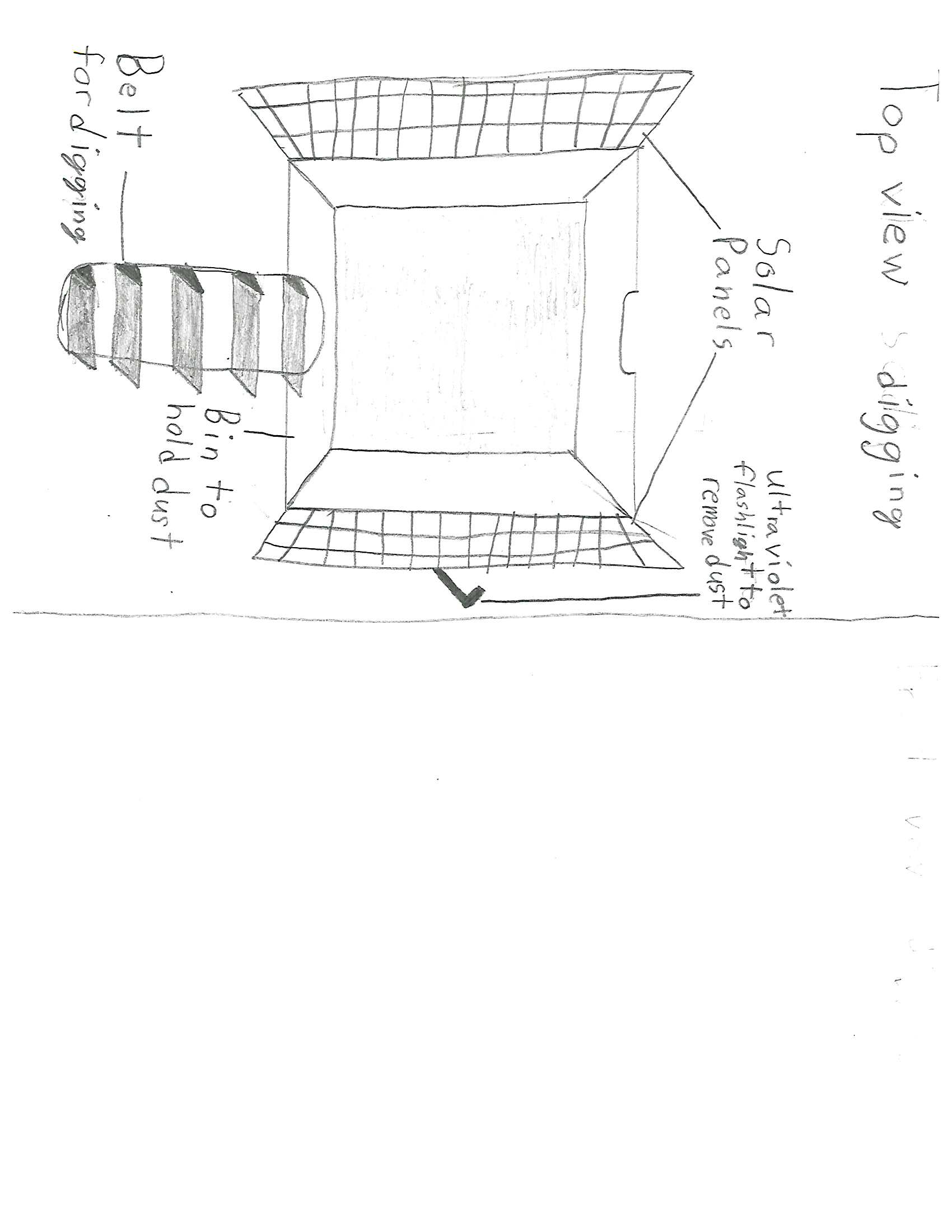
My design, Hope's Dream, is a robot to dig lunar regolith. Hope’s Dream uses a belt to dig. The belt has sloped triangles like cups to hold the regolith as they are moving up the belt. When the triangle reaches the top it keeps going, dumping the dust. After digging the regolith a light sensor will be covered with regolith. When covered, Hope's Dream will stop digging, the belt will flip up, and the robot’s treads will go in reverse. When a certain distance is reached the robot will dump. A weight sensor will activate when there is no weight and in the dump potion. The robot’s tread will go in reverse and Hope's Dream will go back and dig. If Hope's Dream gets clogged with dust her ultraviolet flashlight will help get the dust off. Solar panels charge the robot. Hope's Dream uses treads with spikes to move around.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org