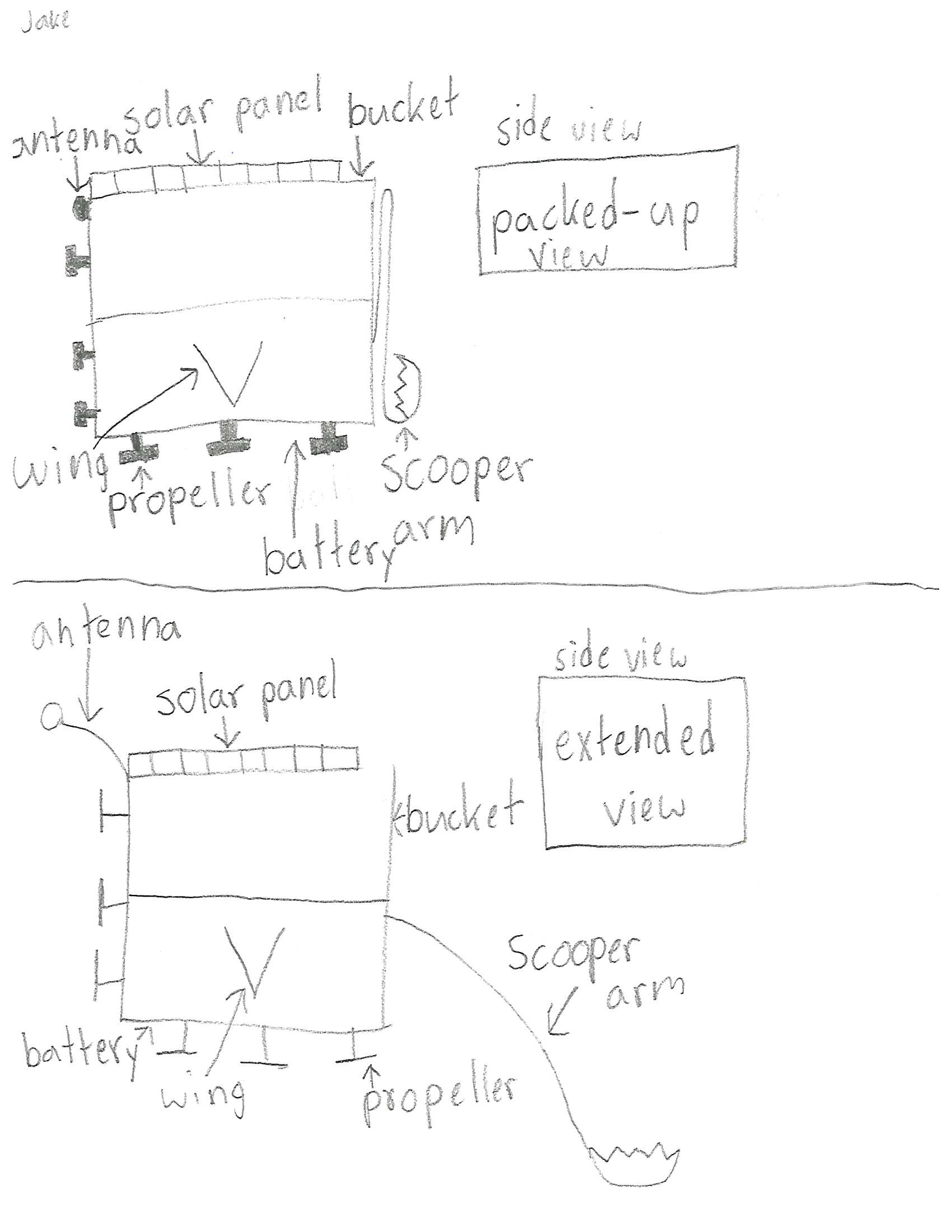
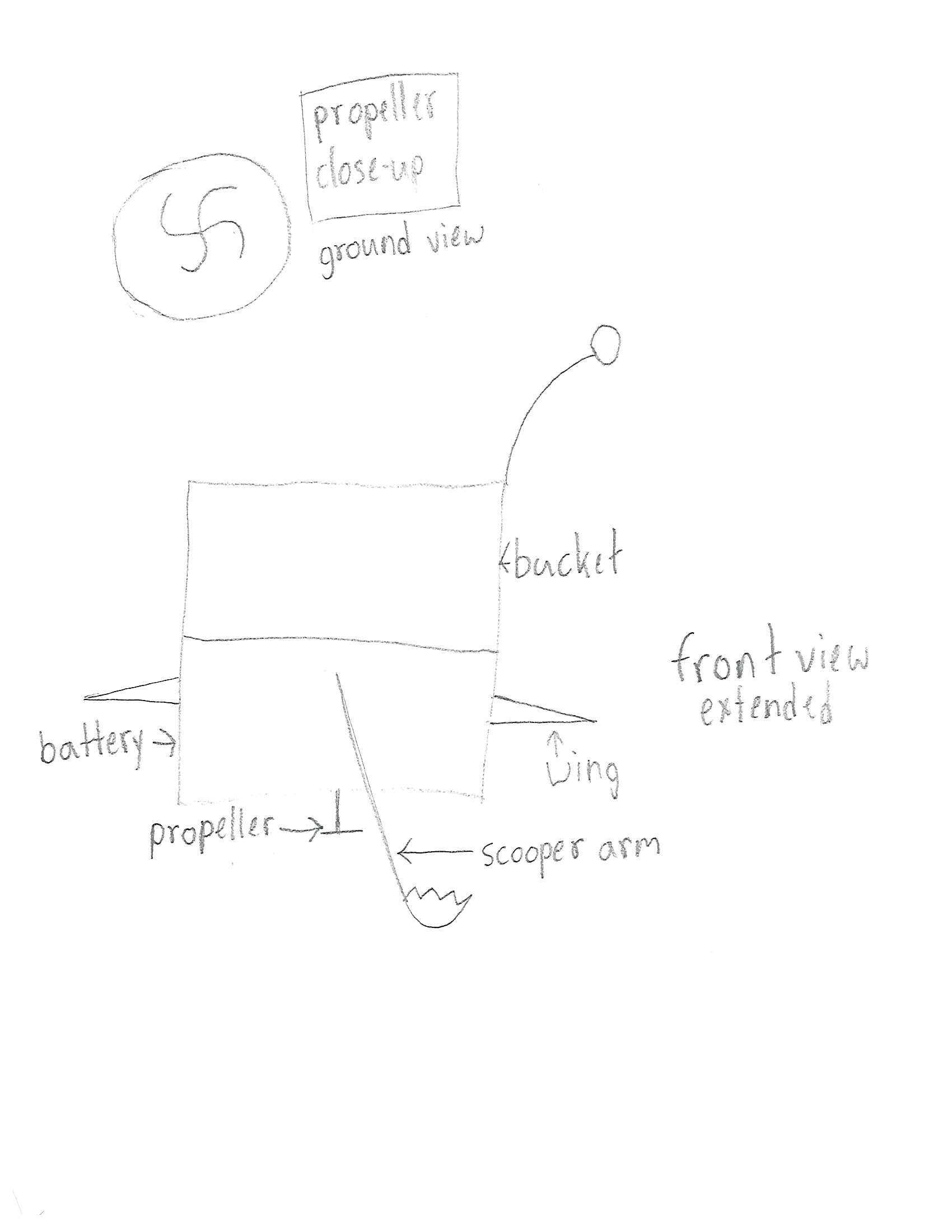
My lunar drone named Digger is designed to dig regolith on the moon. It has a scooper arm in front to scoop the dust into a bucket. My robot is powered by solar power, the reason that I chose solar power is because the lunar south pole is in direct sunlight. I call it a drone because it flies. It has two wings on each side and six propellers. The scooper arm has a sleeve on it to protect it from the very clingy regolith. The robot also has a non-cling coating on the other surfaces. Digger will be controlled by a robot driver on Earth. The scooper arm has joints to move and bend. The robot flies so it doesn’t kick up as much dust. Digger also has an antenna to transport the signals from the controller on Earth.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org