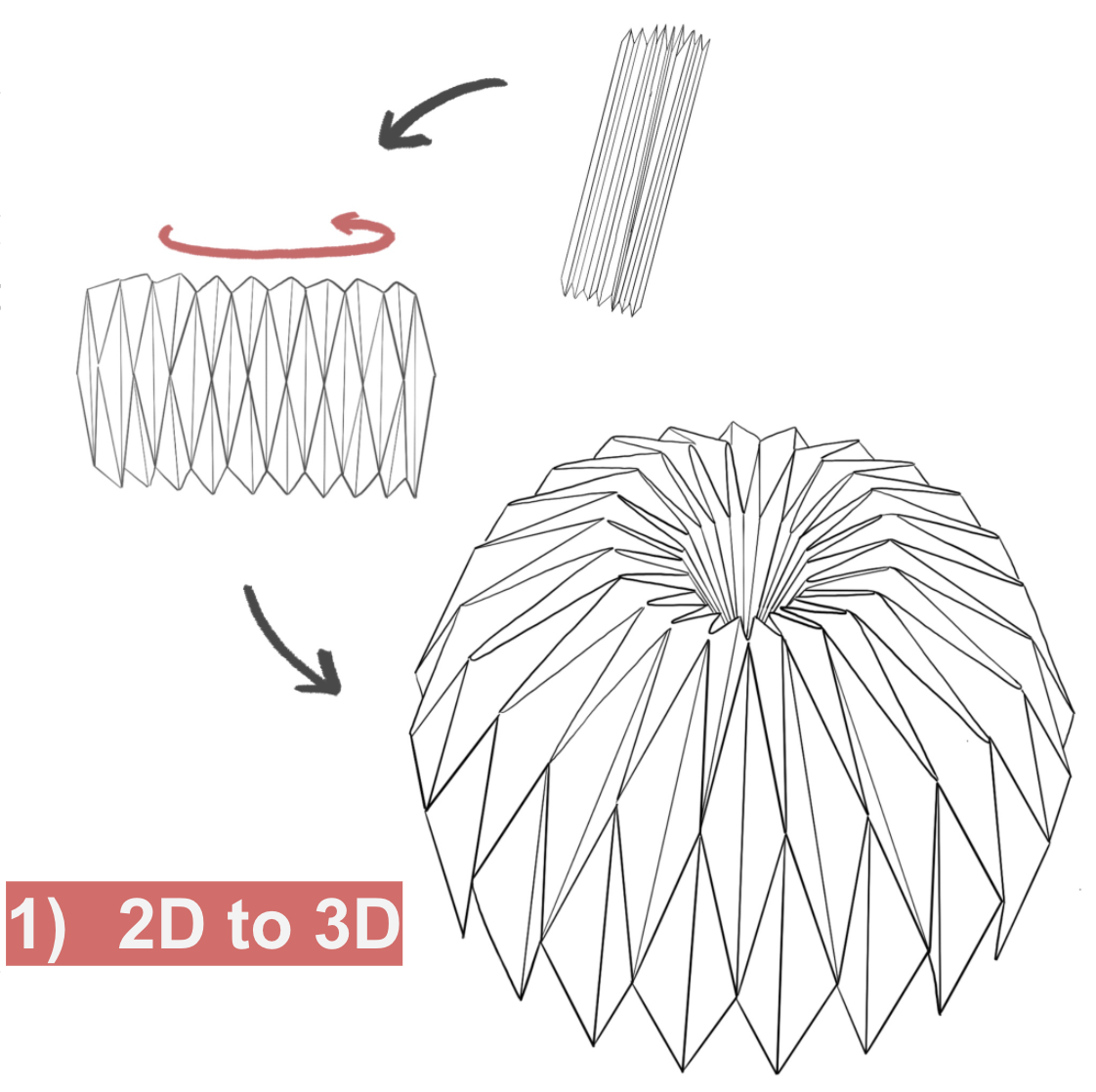
1. 2D to 3D. Using a mechanism of origami, the robot is designed as two detachable parts that are both foldable, which helps easier transport of the robot to space. Also, the implication of origami blocks the fine dust penetrating and corroding through the joint by its jointless structure.
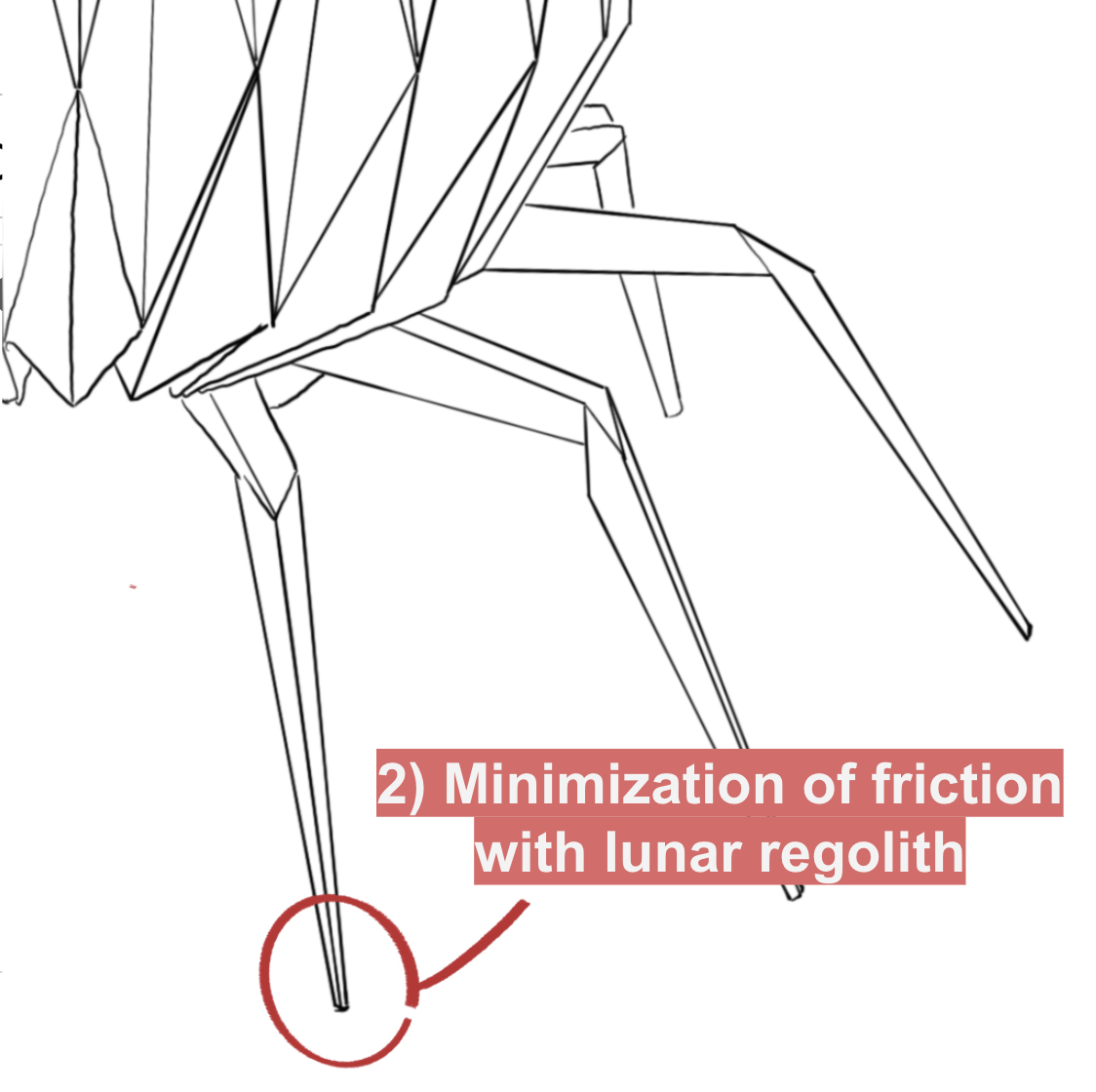
2. Legs are inspired by crabs, minimizing the friction with lunar regolith. Its legs enable 360° walking performance, which eliminates the unnecessary movement to change direction.
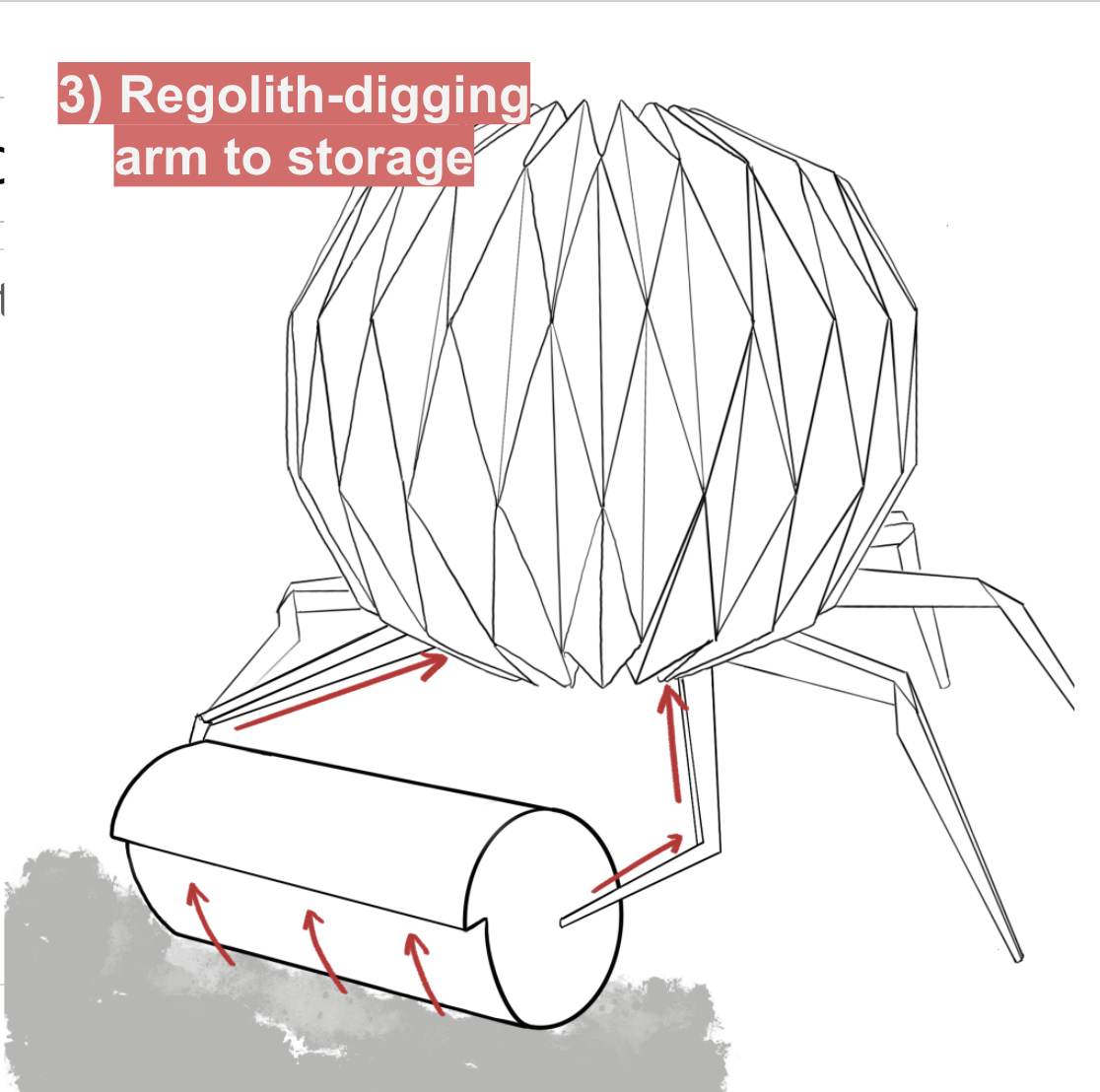
3. The robot has an arm that digs a lunar regolith and transfers it to its storage. In this way, the robot carries lots of dirt per trip, increasing the time and energy efficiency.
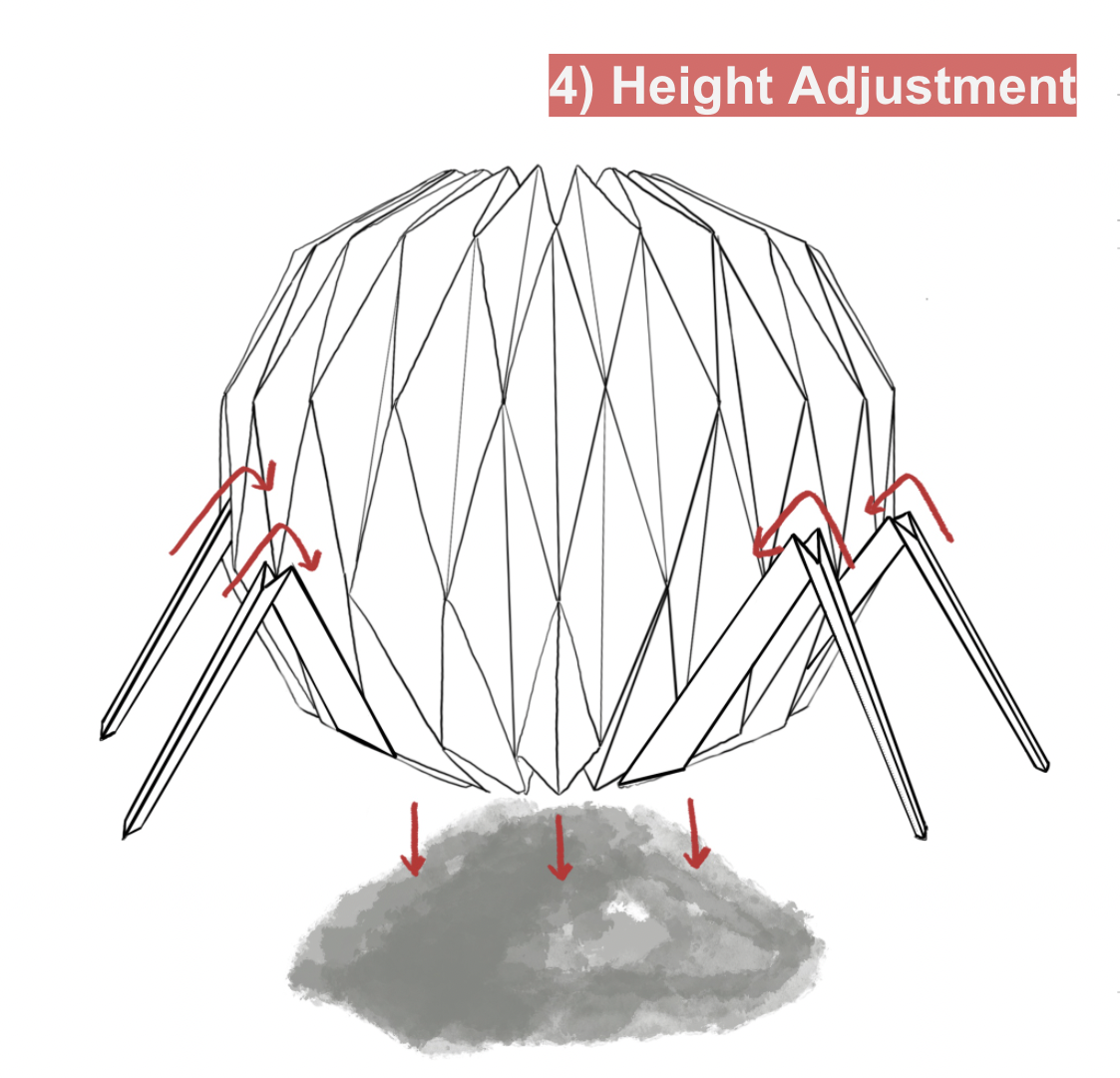
4. When pouring the lunar regolith at the station, to prevent them falling from high position and causing the dust disturbance, the legs of robots are designed to adjust their height.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org