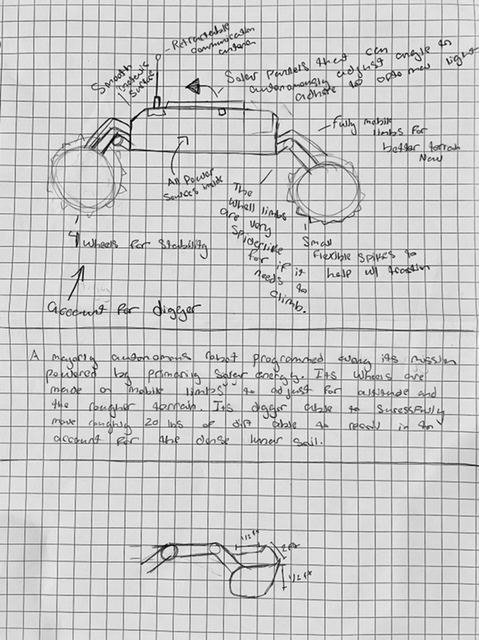
A largely autonomous robot programmed along its mission and primarily powered by solar energy. Its wheels are made on mobile limbs to adjust for altitude and the rough lunar terrain. Its digger attachment is able to successfully move roughly 20 lbs of dirt with the ability to reset to account for denser lunar soil. All power sources, communications modules and computers are housed in a fully encased body that includes a secondary outer shell to help prevent dust contamination.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org