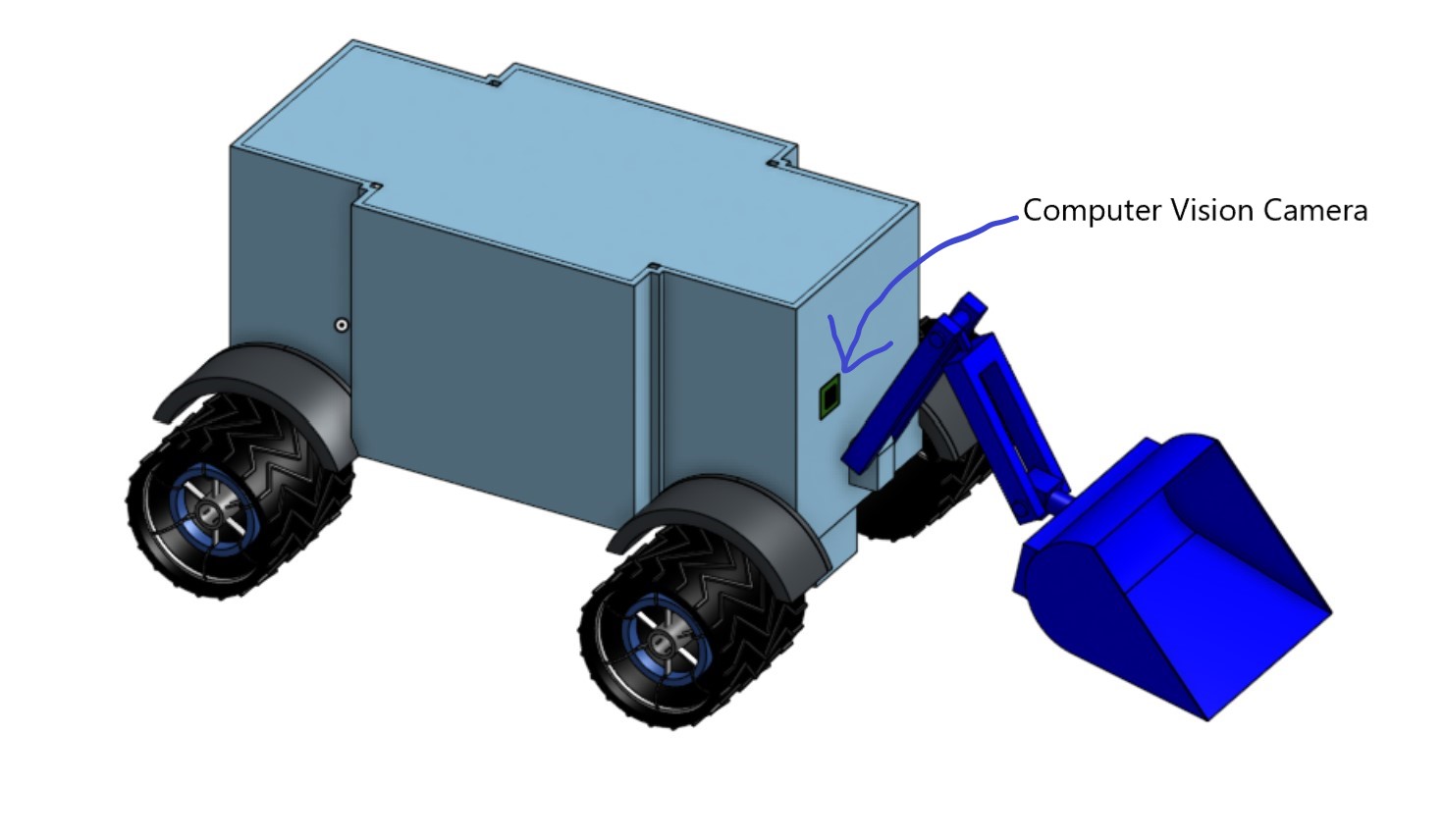
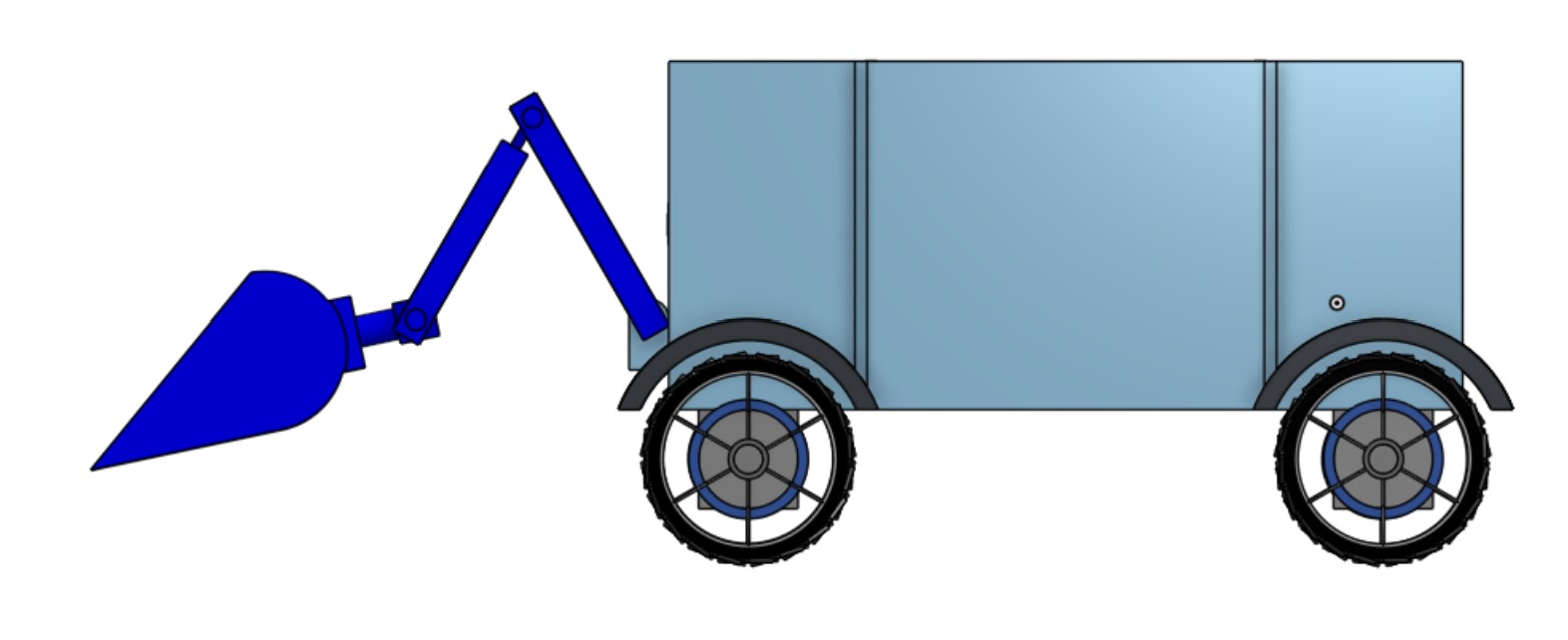
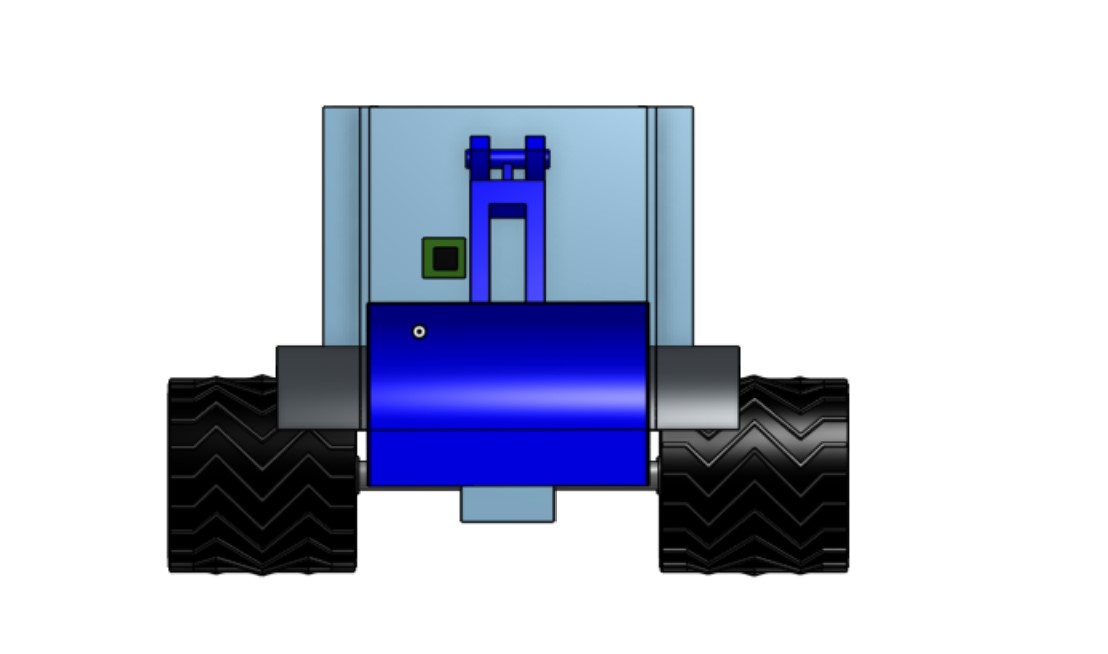
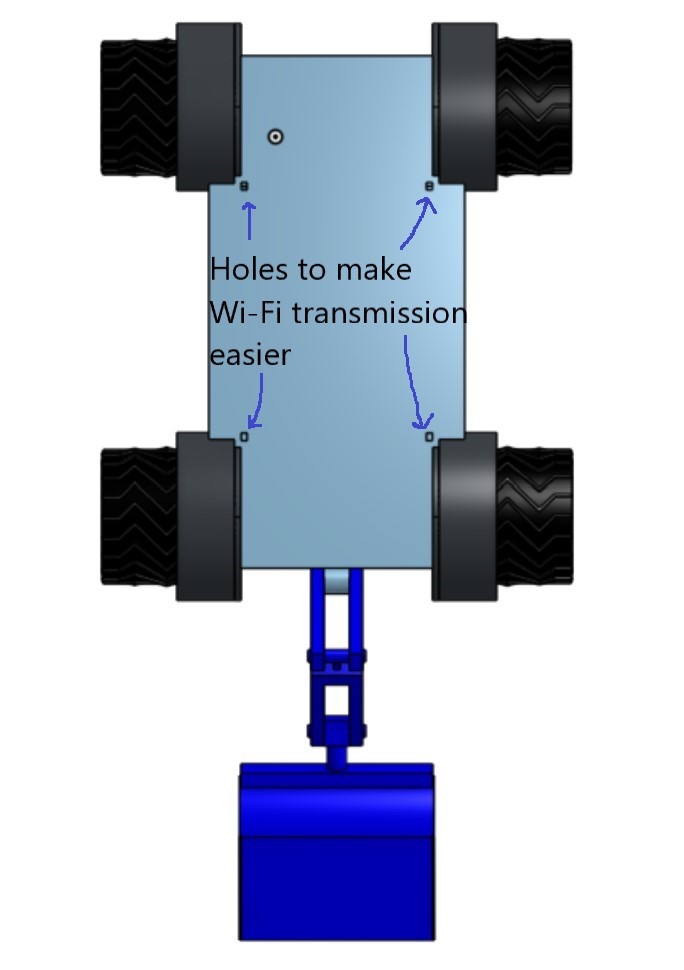
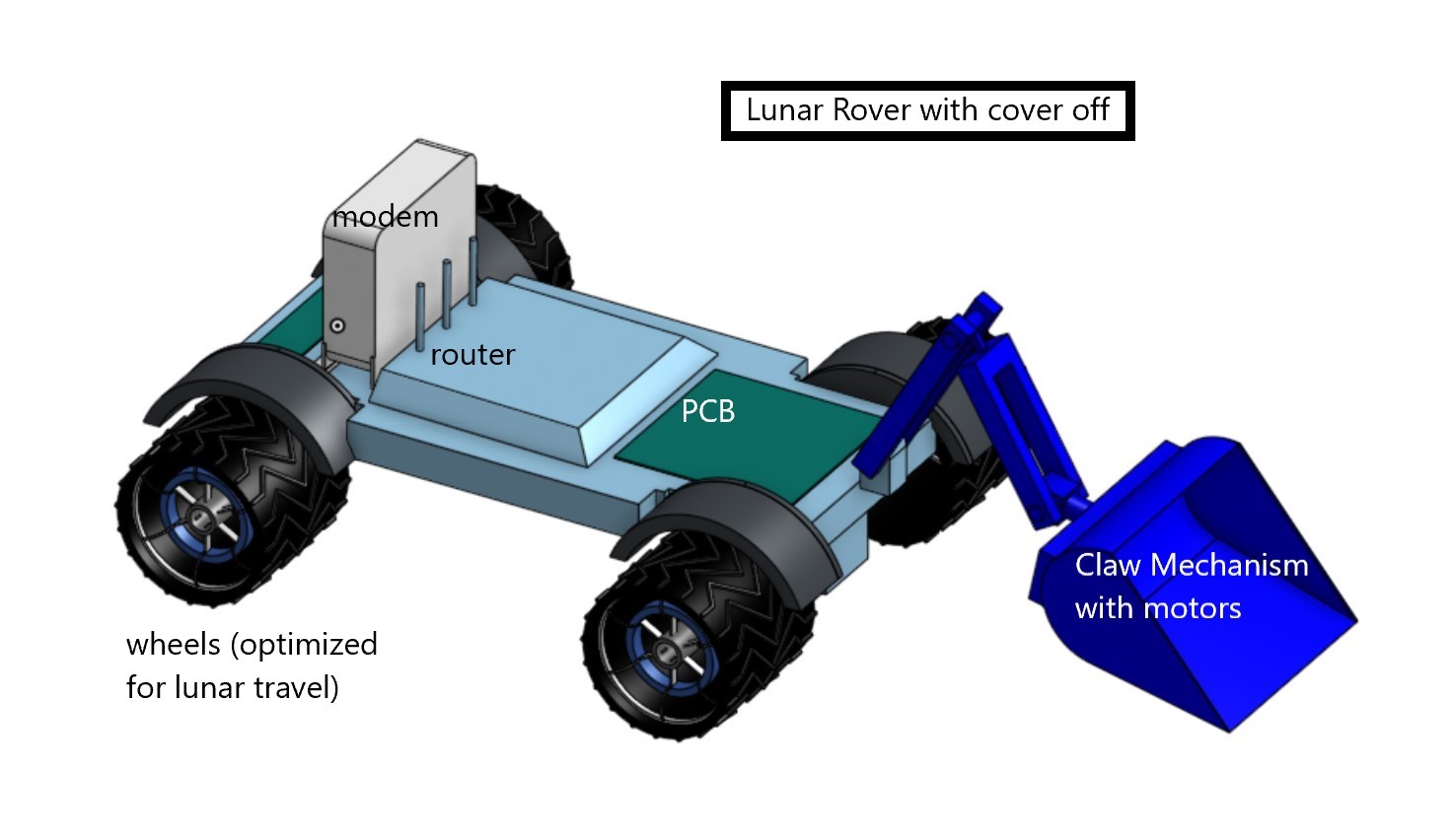
This lunar rover uses a claw powered by three servo motors and one stepper motor to collect the regolith and dump it into a motorized transportation box that it could push to the lunar base. The stepper motor enables the claw to horizontally push the regolith into a big pile before scooping it up to ensure that it is picking up the maximum amount of regolith. This rover uses Machine Learning models created from the previous regolith datasets to ensure that it collects necessary regolith with size, texture, and mineral component restrictions. It also uses a Computer Vision camera to generate the best pathfinding algorithms to collect regolith from a particular mining site, which saves energy. This rover has a cover to ensure that the regolith does not interfere with the electronic components. This rover transmits the regolith collection data to the lunar station through Wi-Fi and IoT protocols.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org