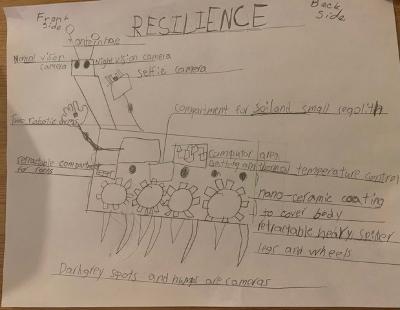
Factoring cost, my design includes enhancements to the existing rovers physical design, operational design, and issue of dust.
Mirroring nature, physical enhancements include retractable spider-like legs (allowing adaptation to uneven terrain and providing faster movement without tipping) alternating with all-terrain vehicle tires. Two large sterile compartments store various sizes of regolith; one retractable front unit for large rocks, and one in the body for soil collected by a vacuum in the rovers arm. Operationally speaking, storing more regolith combined with faster mobility, yields far fewer trips from the Lunar South Pole to the future Artemis Moon Base. An additional robotic arm (one on each side) provides greater stability, and gives it the ability to pick up larger rock. More cameras on the arms allows for panoramic pictures, and more pictures beneath the soil. Nano-ceramic coating on the machinery provides a waterproof, rust and dust-proof finish.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org