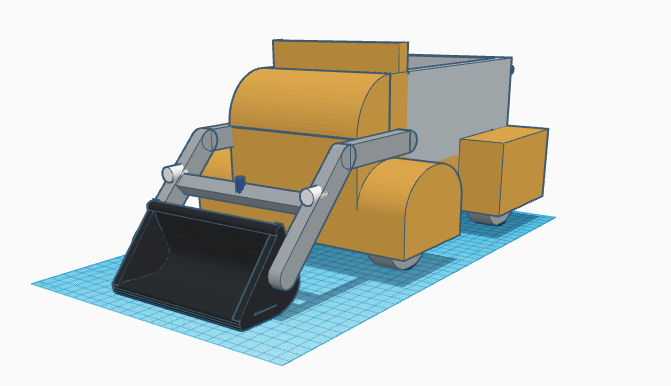
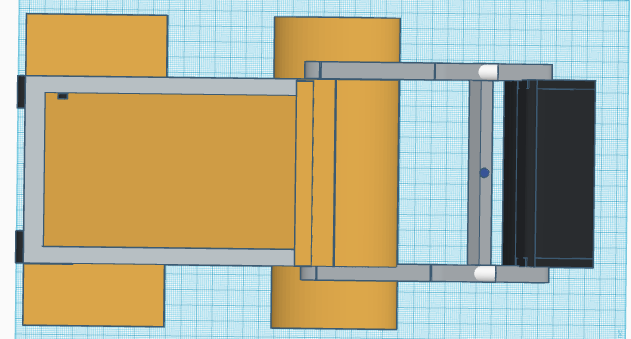
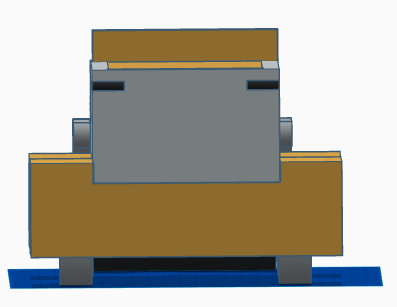
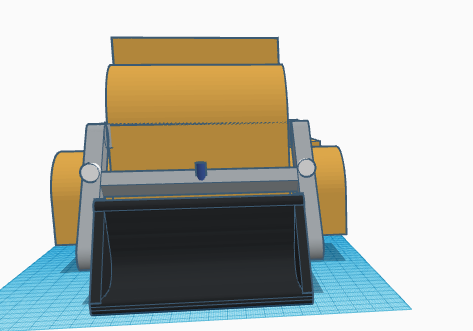
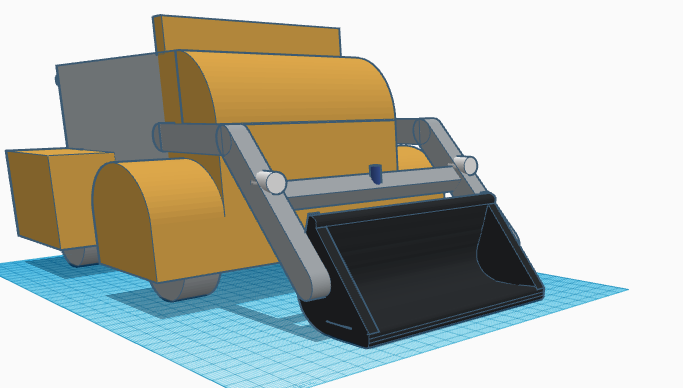
My Lunar rover is 37-1/8” long, 20” wide, and is 16” tall. It has four wheels, each with its own electric motor that allows “tank-turning." The rover has a fully articulating arm that will pick up regolith and then bend backwards to dump it into the cargo hold. On the arm, there is a camera on the crossbar to allow the programming to determine which lunar samples should be moved. It also has two LEDs that allow the camera to see. In the cargo hold, there are two sensors that allow the robot to know if it is full of cargo or empty. To dump samples, the rover has a door on the back that swings open from two motorized hinges, to allow the dust and/or rocks to fall out due to the inclined plane in the cargo hold. Finally, to handle the dust, each wheel is fully covered.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org