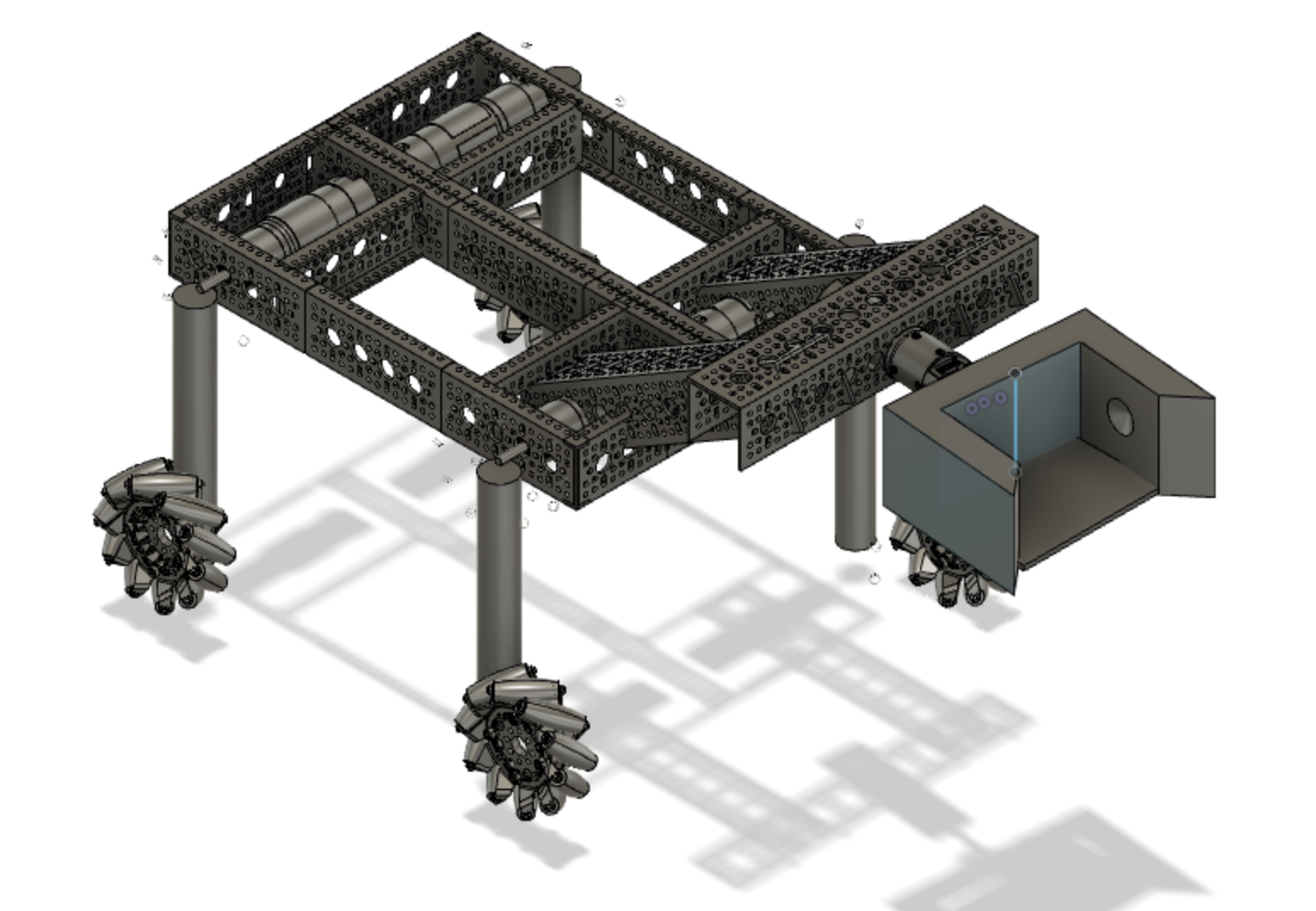
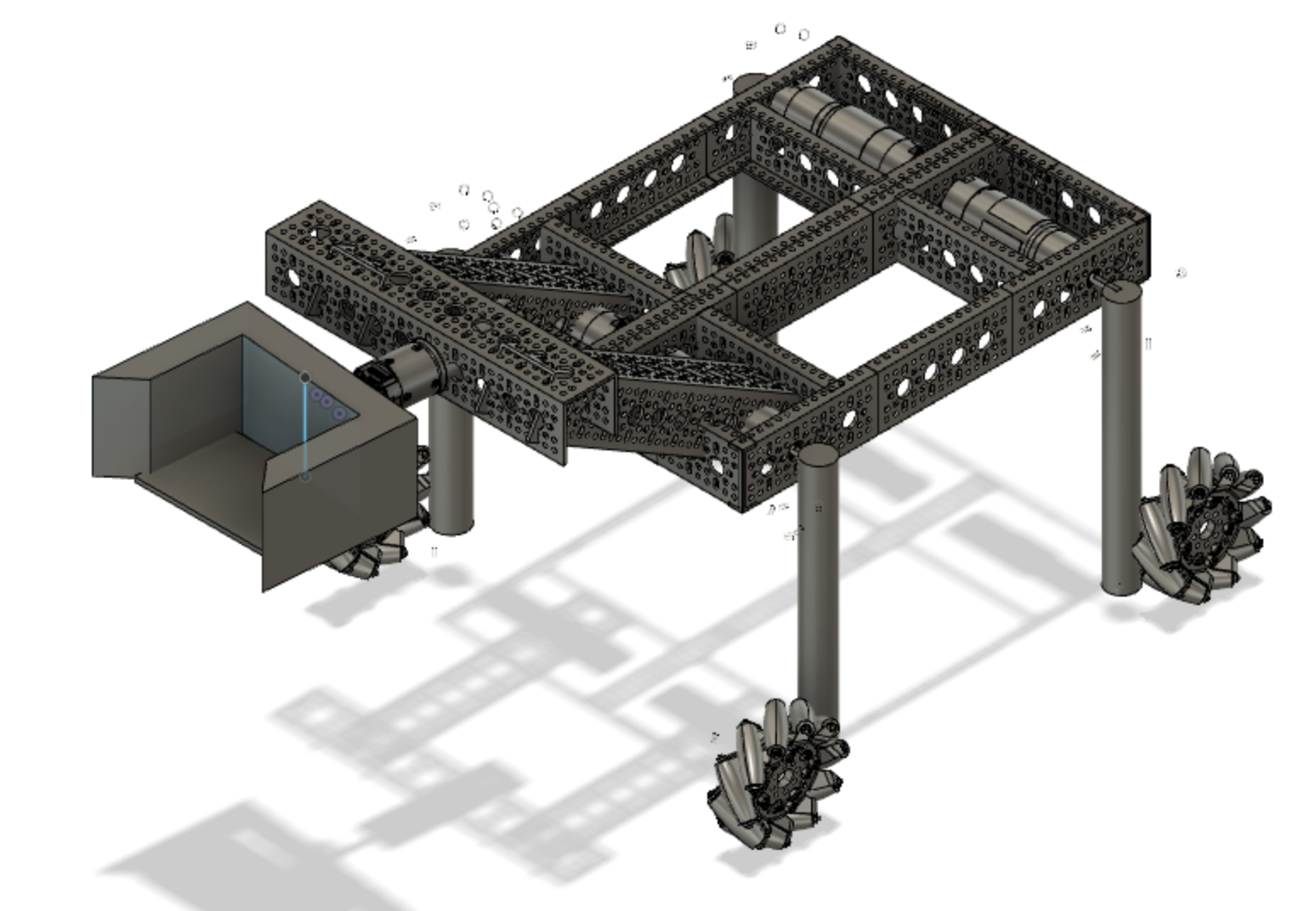
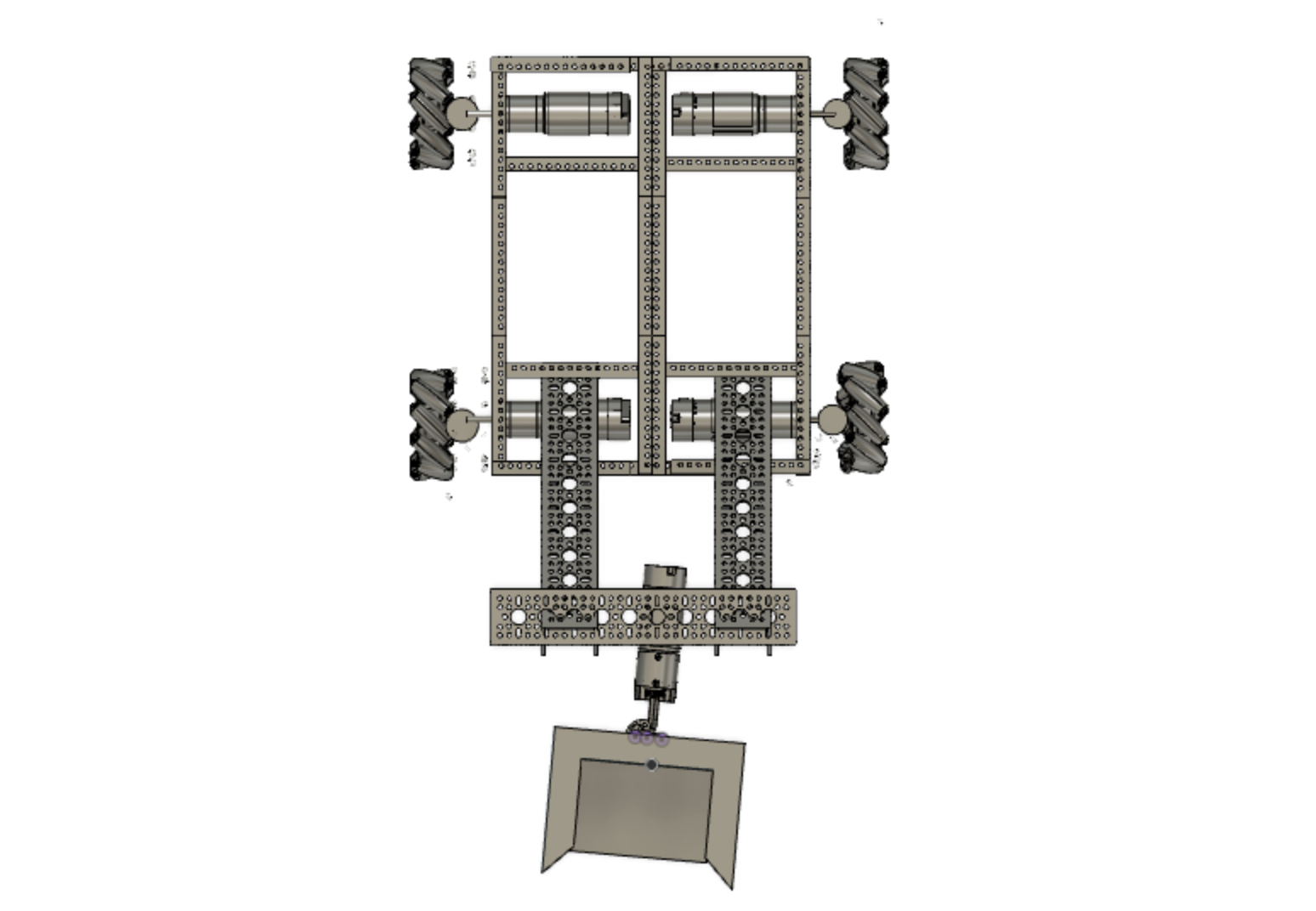
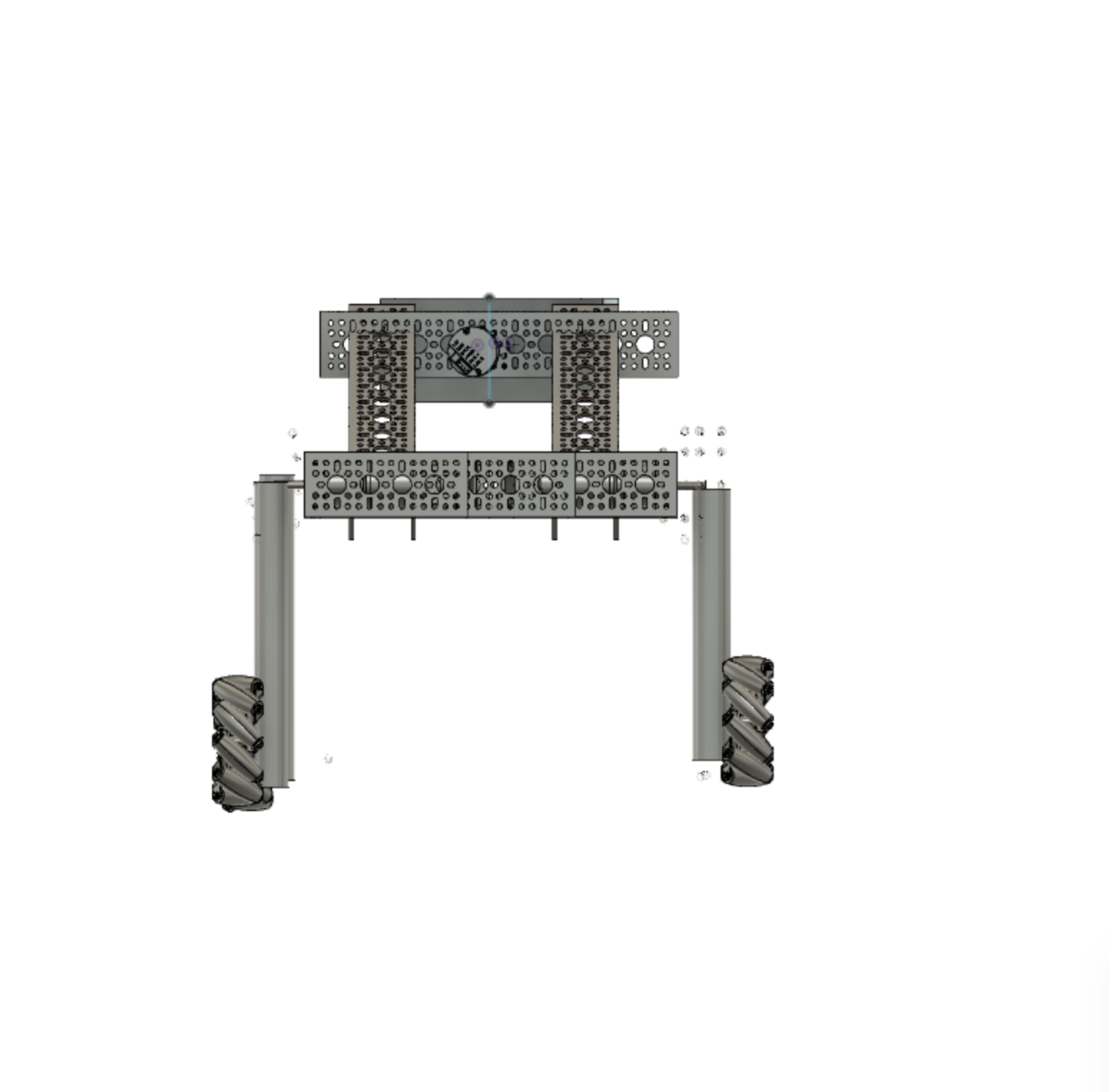
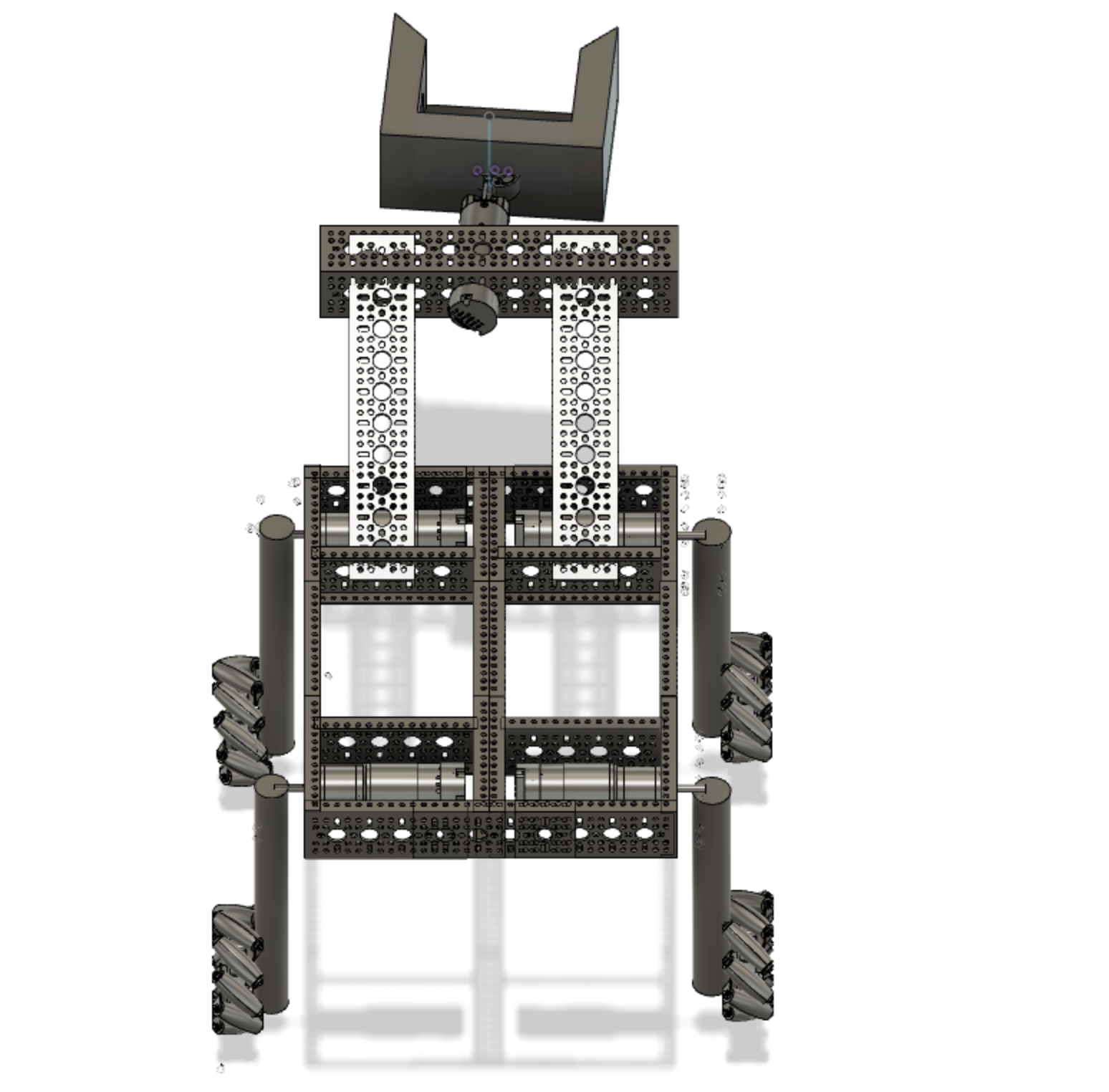
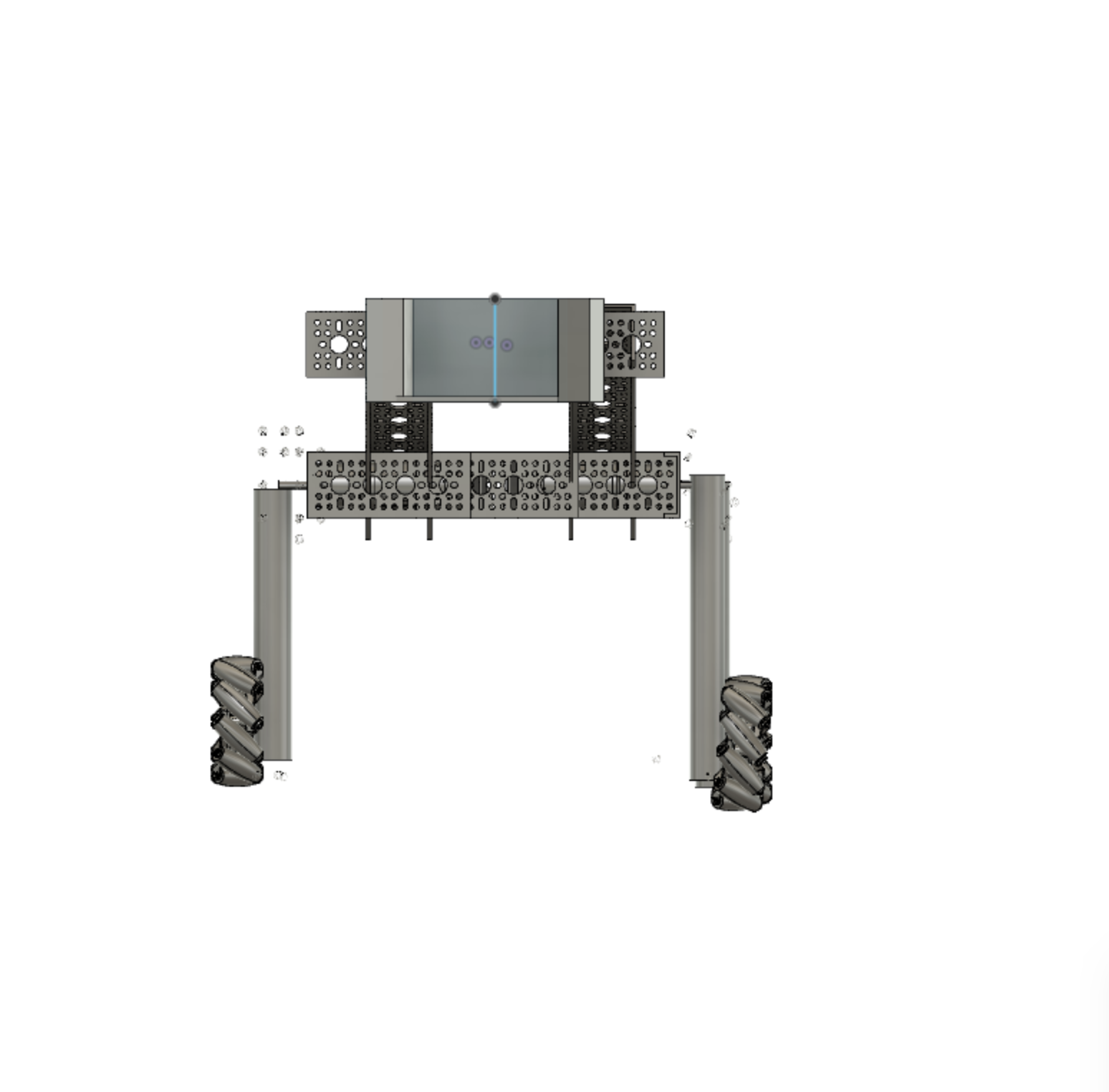
This rover collects lunar dust using a combination of servos, chassis, and other mechanical designs. The drivetrain consists of an elevated base that will allow the robot to stay above lunar rocks. The intake department will use a v-rail in order to close the intake mechanism to trap the lunar dust into the component. The servo will power the v-rail and move the two ends of the intake compartment together in order to allow the rover to take in as much dust as it desires at the exact time and speed that it desires. The long arm length allows the rover to collect lunar dust both directly off of the ground and any dust that may be present a few feet above the ground. Through efficient mechanical design, the rover will be able to collect lunar dust at various ranges at desired times while effectively navigating the lunar surface.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org