

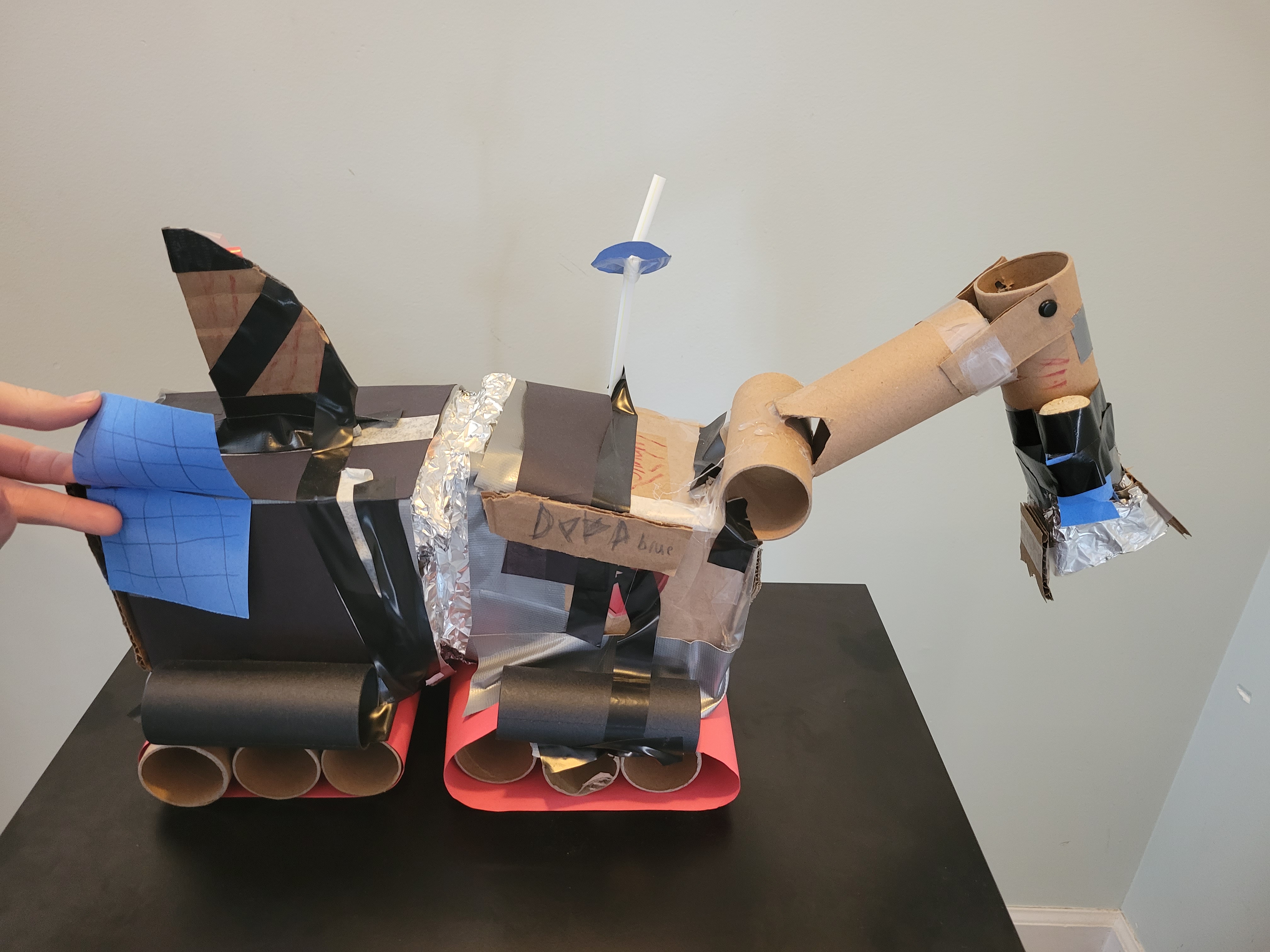

Deep Blue is an unmanned rover designed to pick up lunar soil using a straw-like arm or a claw-like arm for larger rocks.
The rover can be controlled by humans or coded to operate independently.
It has moving treads that operate independently from each other to go over rough terrain easily.
The body turns like a snake to navigate tight turns and small crevices.
It can be taken apart and put back together in different configurations, making it adaptable to its environment and transportation easy.
It has: a foldable solar panel, two backup batteries, extra storage compartment, a retractable satellite dish, and armor to protect from moon dust and radiation. These features allow it to carry lots of dirt each trip and take many trips without stopping for needing a charge or repair.
NASA can observe the progress of the mission from 3 cameras on the arm, front, and back.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org