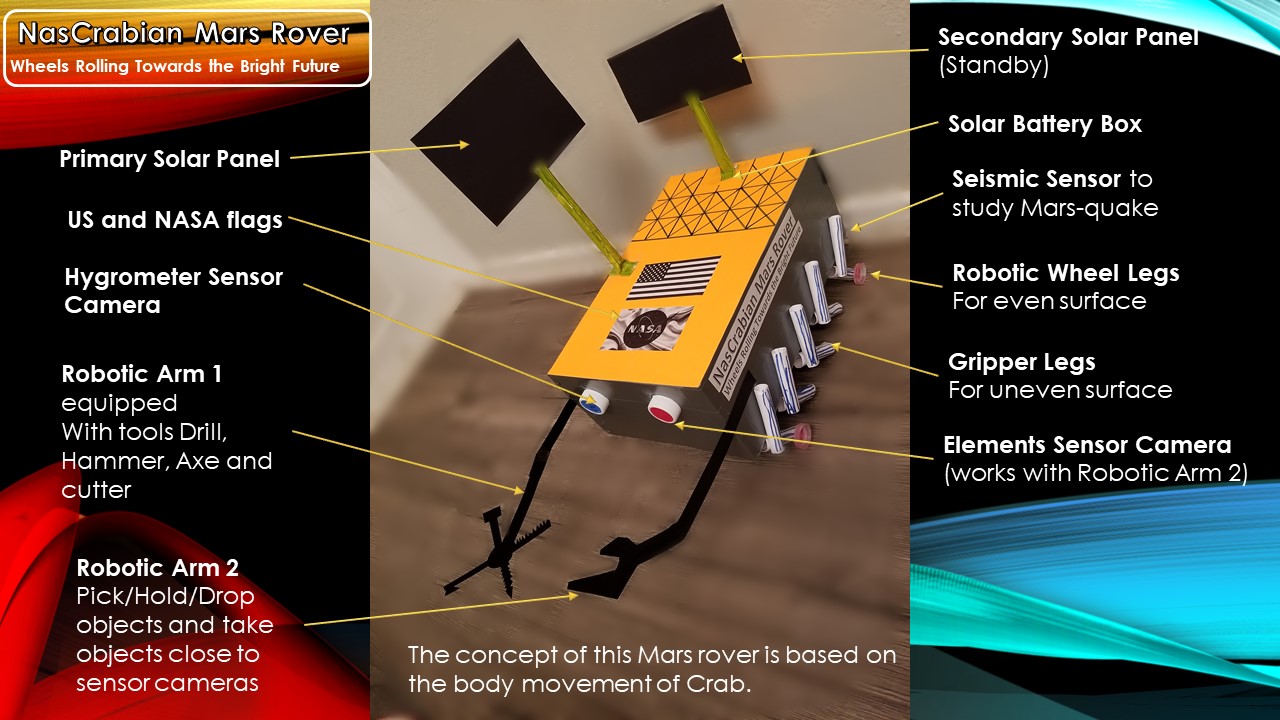
My idea is to let Mars rover walk on the even and uneven surface effectively. I have done physical model of Mars rover having to different walking mechanism. Wheeled legs are for even surface of Mars. These wheels are self propelled and only one wheel can change its direction without other three wheels. Model also have gripper leg mechanism which is intended to uneven surfaces so that the rover maintain it's balance effectively without any problem. My wheeled rover model is based on body movement of Crab, sounds funny!!! That's why I named this rover "NasCrabian Mars Rover". Please refer attached drawing for more details. Thank you!
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org