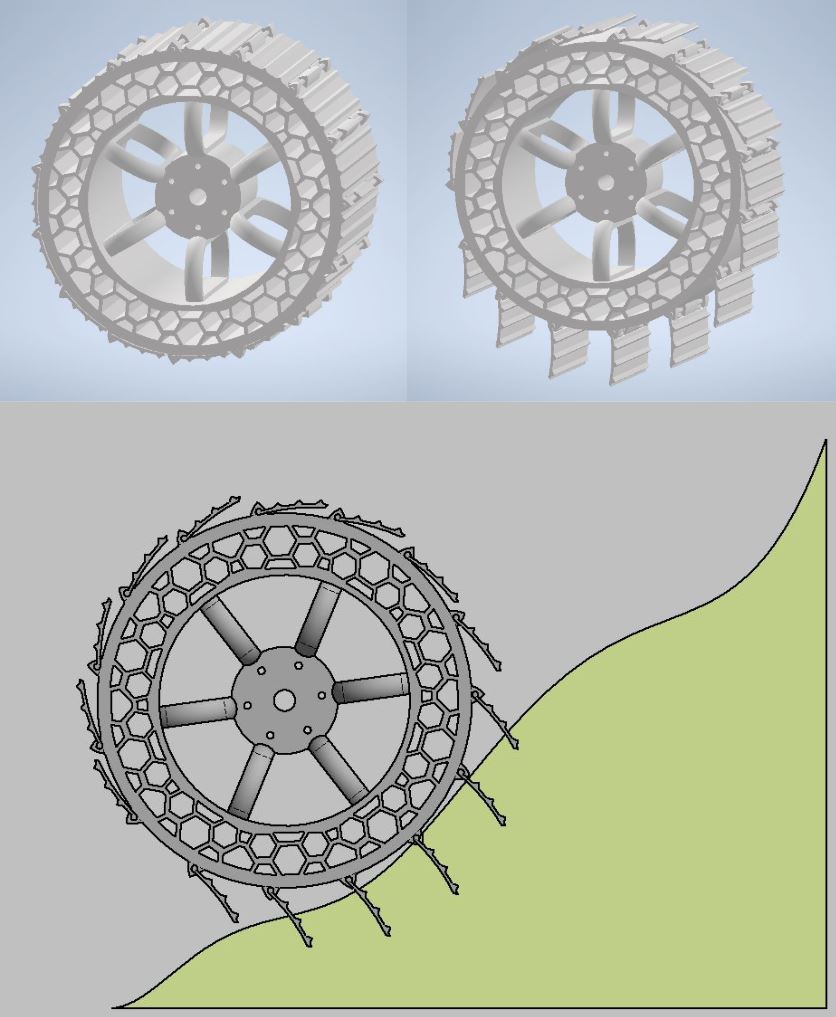
I included a honeycomb-patterned spring and curved spokes to increase compression to allow the bottom of the wheels to flatten on sand. The wheels have individually powered active grousers for sandy surfaces where the angle of each grouser can be adjusted. With passive grousers, the rover would be prone to slippage on inclined sand. This increases the likelihood of the rover digging and sinking into sand on an incline. With active grousers, however, we could adjust the angle of the grousers touching the sand to be constantly perpendicular to the inclined sand. This would decrease the amount of sinkage and reducing the probability of the rover being stuck in sand dunes. The wheels could be further improved by implementing a swerve drive system with a motor for every wheel designated to turn each wheel a full 360 degrees. This would allow for rovers to move diagonally and strafe.
Download File
Download File
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org