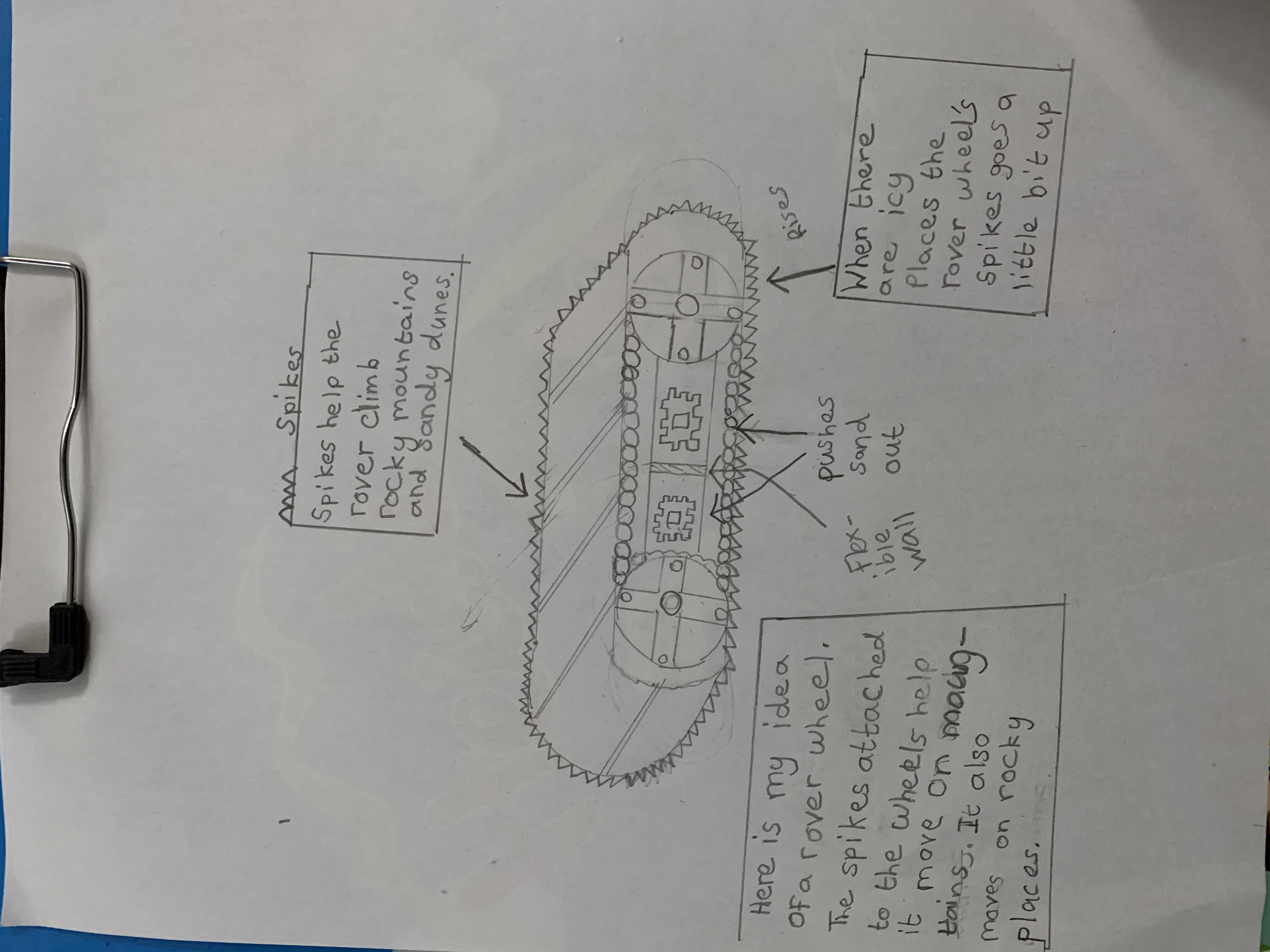
My rover wheels can drive on Mountains, ice bergs and sandy dunes. The 2 large wheels have a cylindrical shape and it is flexible enough to climb up and down. It also rotates 360 degrees.
Since Mars has lots of sandy surfaces, I designed it with Iron mesh wheels as well as spiky wheels attached with sensor. The sensor will help to switch the wheels either mesh or spiky mode, based on the surface of Mars. The wheels can adjust modes on the icy surface too.
Mars has a lot of sand, so the wheels have a possibility to get stuck, but I designed the wheels to push the sand out. The wheels are made of Titanium, iron and aluminium.
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org