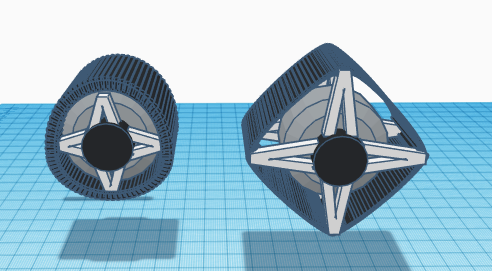
The flexible design of my wheel allows it to operate in different shapes based on where it runs. In a desert terrain, the outer layer of the wheel operates in cylinder shape but when it goes to a rocky terrain, it gets pushed outwards to become a rounded-rectangular-prism. The wheel consists of heavy duty industrial rubber on the outer layer and titanium on the inner layer. For the wheel operation, I am using the motor design.
Adaptable Martian Wheel (AMW) was designed based on my research of mars terrain and reading how NASA’s previous wheel failed to go on all terrains. This led me to combine 2 designs into one which can work both in Desert and Rocky terrain. I chose Heavy-Duty-Industrial-Rubber because it is thick and stretchy, and Titanium due to it being corrosion and temperature resistant, light weight and strong.
Download File
Download File
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org