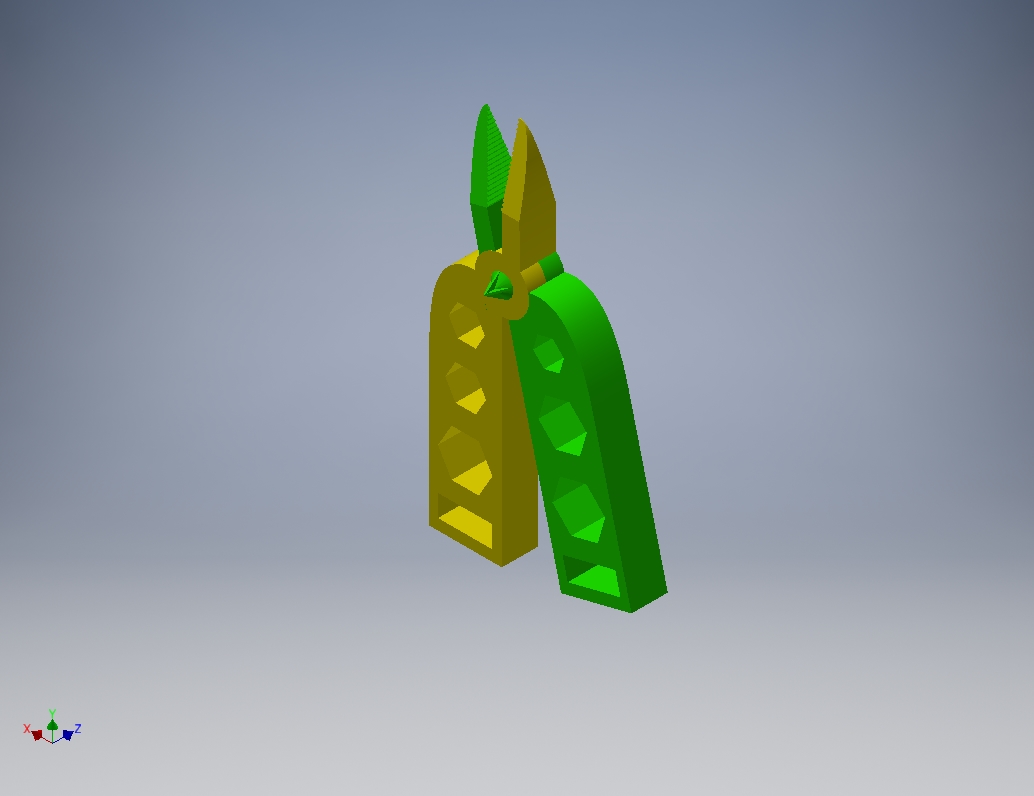
My tool combines a screwdriver, wrenches, and pliers. In space, astronauts are constantly facing zero gravity, thus items with the smallest mass can cause extreme damage if they are not tethered. Integrating 2 rectangular holes near the bottom allows the astronauts to tether it, preventing it from floating away. In order to minimize infill, the two biggest hex holes serve as a place in which the index finger and thumb can be placed in order to obtain grip. In regular screwdrivers, the user must rotate their wrist to use it. However, in space, it is difficult to perform this task with bulky gloves. By installing a phillips head on the fulcrum, the user can perform a pushing downward motion similar to a vise with one hand while the other holds onto the space shuttle. As previously stated, Astronauts have minimal dexterity due to bulky gloves, thus grabbing minute items are impossible. By implementing pliers into my tool, it allows the astronauts to work with small items efficiently.
Download File
Download File
Contact us
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org