


 All About the Moon (Grades K-4)
NASA Interactive Moon
Lunar Reconnaissance
Artemis Mission Page
What is Artemis?
What is Artemis? (K-4)
What is the Artemis Program (5-8)
Preparing To Go
Moon Landing Sites
NASA’s RASSOR
NASA’s Coating Technology
Dust: An Out of this World Problem
NASA’s New Moon Duster
Impact of Dust on Lunar Exploration
NASA to Develop Tech to Melt Moon Dust, Melt Oxygen
The Moon’s South Pole Media Resources
Digging the Dirt: NASA benefits from Lunar Surface Simulant Testing
Apollo to Artemis: Drilling on the Moon
Lunar Surface Initiative
NASA Robotics News
Moon History: Apollo Missions
One Giant Leap for Mankind
Apollo 50th Anniversary Celebration
Apollo 11 Bootprint
Artemis Videos
NASA’s Plan for Sustained Lunar Exploration and Development
An Update on Lunar Dust Mitigation Strategy
All About the Moon (Grades K-4)
NASA Interactive Moon
Lunar Reconnaissance
Artemis Mission Page
What is Artemis?
What is Artemis? (K-4)
What is the Artemis Program (5-8)
Preparing To Go
Moon Landing Sites
NASA’s RASSOR
NASA’s Coating Technology
Dust: An Out of this World Problem
NASA’s New Moon Duster
Impact of Dust on Lunar Exploration
NASA to Develop Tech to Melt Moon Dust, Melt Oxygen
The Moon’s South Pole Media Resources
Digging the Dirt: NASA benefits from Lunar Surface Simulant Testing
Apollo to Artemis: Drilling on the Moon
Lunar Surface Initiative
NASA Robotics News
Moon History: Apollo Missions
One Giant Leap for Mankind
Apollo 50th Anniversary Celebration
Apollo 11 Bootprint
Artemis Videos
NASA’s Plan for Sustained Lunar Exploration and Development
An Update on Lunar Dust Mitigation Strategy











When designing a robot to dig on the Moon, you need to think about lunar regolith, the soil of the Moon. Lunar soil (regolith) is very different from Earth soil. Lunar regolith is mostly made up of gray, powdery dust, and small broken rock, mineral, and glass fragments. The very fine lunar dust can range in size from .2 to 100 microns. To put this in perspective, 80 microns is about the diameter of a single human hair. The lunar dust can be finer than flour, while also being very sharp and jagged. It's also clingy! Lunar dust is electrostatically charged which makes it stick to everything. Like when a person rubs a balloon on their hair and the hair sticks to it, or like when your clothes have static cling and it sticks to your body. How will your robot dig and move lunar regolith? Will it kick up a lot of dust? If so, how will you deal with it?
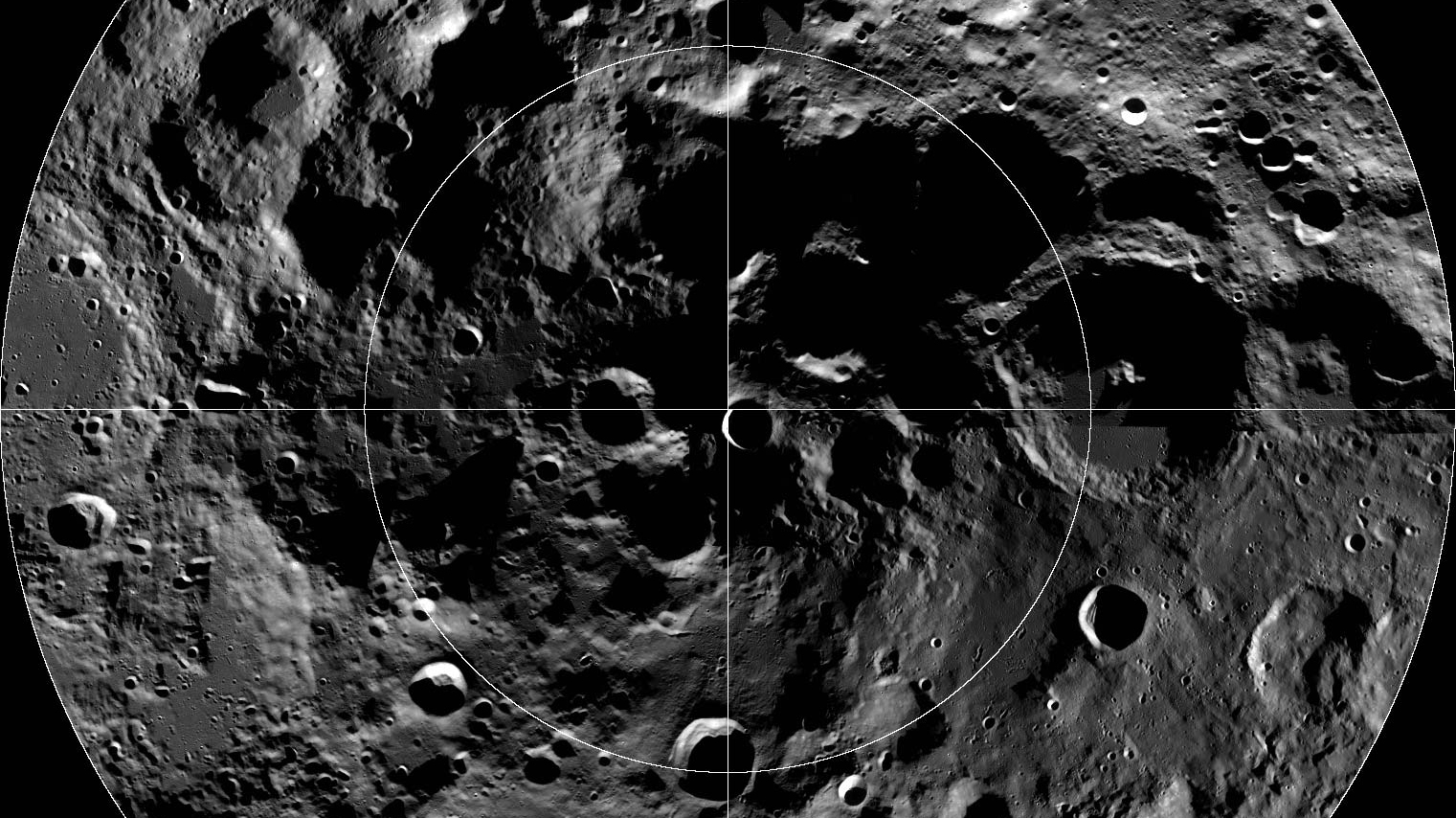
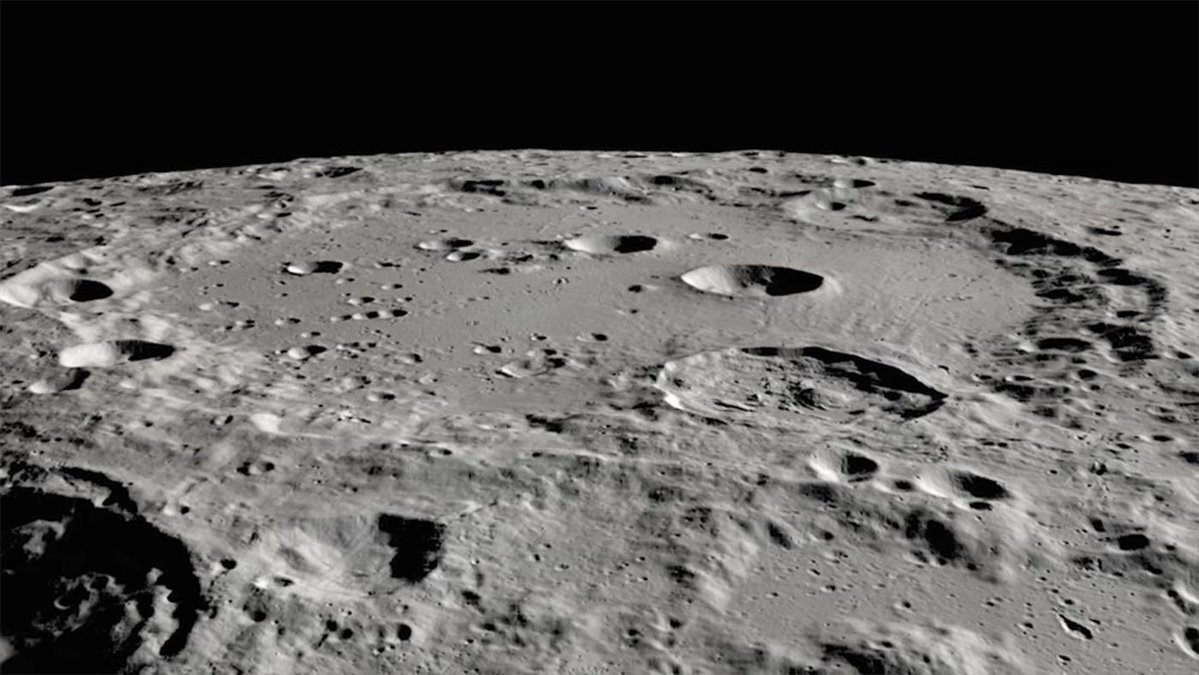
NASA is planning to build an Artemis base camp near the lunar South Pole, where the crater rims are in almost continual sunlight and the interior of the craters is home to "permanently shadowed regions” that never see sunlight. Your robot should be designed to operate on a crater rim, in sunlight, and transport lunar soil approximately 100 meters (328 feet), which is about the length of a football field. Since the Moon does not have an atmosphere like Earth that also means there is no protection from the sun and its radiation. Your robot should be able to handle midday temperatures that can reach 127°C (hotter than boiling water) and nightime temperatures as low as -173°C.
How will your robot dig and excavate the lunar soil? Will it have a scooper arm, a drill, a conveyor system, or something else? Will you do one big excavation or lots of little digs to collect the soil? Will your robot be really zippy and fast when it digs or slow and steady? Think about the mechanics of how your robot will dig and excavate the soil.
The Moon has 1/6th of Earth’s gravity, so your robot won’t weigh as much as it would on Earth. This also means it will have less traction. How will you design your robot to ensure it has enough traction to move around the lunar surface? Will you make your robot heavier than it would be here on Earth? Will it have wheels, treads or move along the Moon in some other way? Keep in mind that your robot needs to transport lunar soil about the distance of a football field every time it makes a trip from the excavation site. How will you make sure it grips the surface and doesn’t just spin its wheels?
When designing your robot, you will want to make sure it is balanced. Consider its center of mass and how that might change when your robot digs lunar soil. Will it tip over or stay upright? How about when it starts moving and transporting the soil? What about when it is empty and is making the return trip to the excavation site? There are a lot of creative ways to think about making a balanced robot that digs and moves soil!
Operational considerations are important. Of course, the overall goal is to be as efficient as possible with digging soil. What does an efficient design look like to you? Will your robot move slow, fast, or at varying speeds? If it moves fast, how will it combat the challenges of kicking up lunar dust?
Since lunar dust is sharp, abrasive, and clingy, your robot must have ways to protect itself. Think about some passive ways your robot can keep itself safe from that pesky dust that can scratch important components or clog up joints and axles. What passive solutions might your robot use to protect itself from dust? Will it have covers, sleeves, or special coatings?
Since lunar dust is sharp, abrasive, and clingy, your robot must have ways to protect itself. What are some active ways your robot can combat dust? Will your robot use a dust brush or wiper? Or blast some compressed air? Or can you develop an electrical or magnetic dust removal system to keep your robot dust-free?
Your robot needs to operate for long durations in a far-away location on the Moon. How will your robot be powered? Will it use batteries that need to be recharged? What about solar or nuclear-powered designs? The Moon also has many in-situ resources. Is there a source of sustainable energy for your robot that can be harvested on the Moon itself?
Will your robot operate on its own (autonomous), or will it be remote-controlled by an astronaut on the Moon or a robot driver here on Earth. If your robot is autonomous, how will it find its target drilling location and the Artemis base target drop-off location? NASA’s Mars rovers are remotely operated by drivers, but the Moon is different and there will be human presence there soon. There are so many factors to consider!
The Lunabotics Junior Contest is funded by NASA’s Human Exploration and Operations Mission Directorate (HEOMD) and presented in support of the Office of STEM Engagement. This student challenge is part of NASA's efforts to engage the public in its missions to the Moon and Mars. NASA is returning to the Moon for scientific discovery, economic benefits, and inspiration for a new generation. Working with partners throughout NASA, the agency will fine-tune precision landing technologies and develop new mobility capabilities that allow robots and crew to travel greater distances and explore new regions of the Moon. On the surface, the agency has proposed building a new habitat and rovers, testing new power systems, and much more to get ready for human exploration of Mars. Charged with returning to the Moon in the next four years, NASA will reveal new knowledge about the Moon, Earth, and our origins in the solar system.
Thank you for your interest in contacting Future Engineers. We look forward to connecting with you!
General Inquiries
support@futureengineers.orgSponsorship Inquiries
sponsor@futureengineers.org